Understanding the encoders window – Rockwell Automation 2098-UWCPRG Ultraware Software User Manual User Manual
Page 263
Rockwell Automation Publication 2098-UM001G-EN-P - February 2011
265
Configuring the Kinetix 3 Drive Chapter 5
Understanding the
Encoders Window
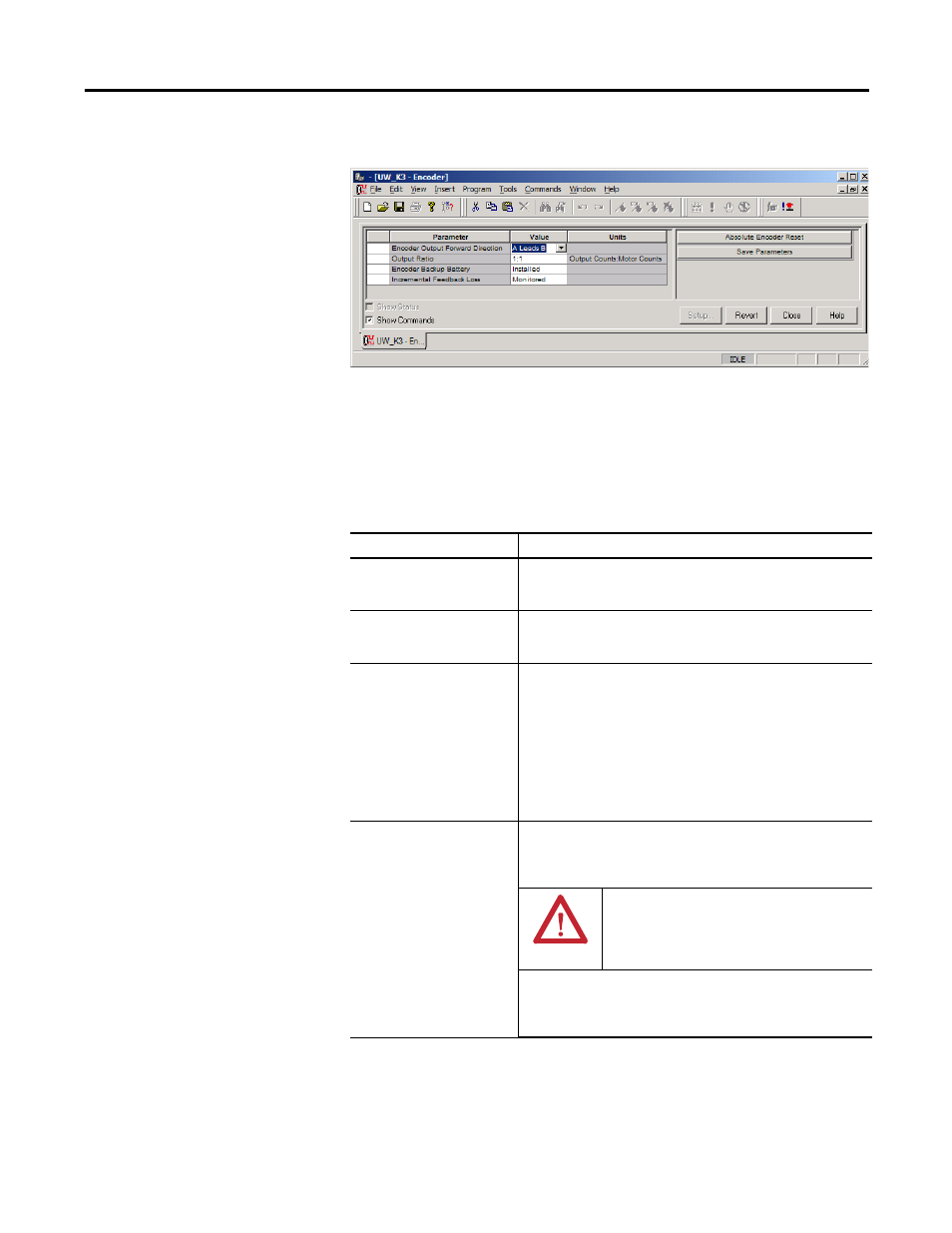
The Properties window for Encoders looks like this.
Use the Encoders window to:
•
configure the motor encoder,
•
execute a command that will reset an absolute encoder position to zero.
This window has these parameters and direct commands.
Parameter Description
Encoder Output Forward
Direction
The order of the A and B signals for the encoder output:
• A Leads B
• B Leads A
Output Ratio
The ratio of encoder output counts to motor encoder counts
received from the motor.
The range is of 1…65,535.
Encoder Backup Battery
The encoder back-up battery, if installed in the drive, powers an
SA35 type encoder that maintains an absolute multi-turn position.
Without a battery, an SA35 type encoder operates as a single turn
absolute encoder. You must configure this setting to let the drive
know if the battery is not present.
Select:
• Installed
• Not Installed
Note: This parameter is visible only if the motor has an SA35 type
encoder.
Incremental Feedback Loss
In electrically noisy conditions, or with long feedback cables, the
drive may experience an incremental encoder cable open fault,
although the cable is OK. Under these conditions, this parameter
can be used to avoid nuisance faults.
ATTENTION: If the incremental
encoder feedback is lost and this fault
is ignored, the drive may cause abrupt
or extreme motion.
Select:
• Monitored: to monitor for incremental encoder feedback loss,
and fault the drive if it is detected.
• Ignored: to not check for incremental encoder feedback loss.