Rockwell Automation 2098-UWCPRG Ultraware Software User Manual User Manual
Page 148
150
Rockwell Automation Publication 2098-UM001G-EN-P - February 2011
Chapter 4 Configuring the Ultra5000 Drive
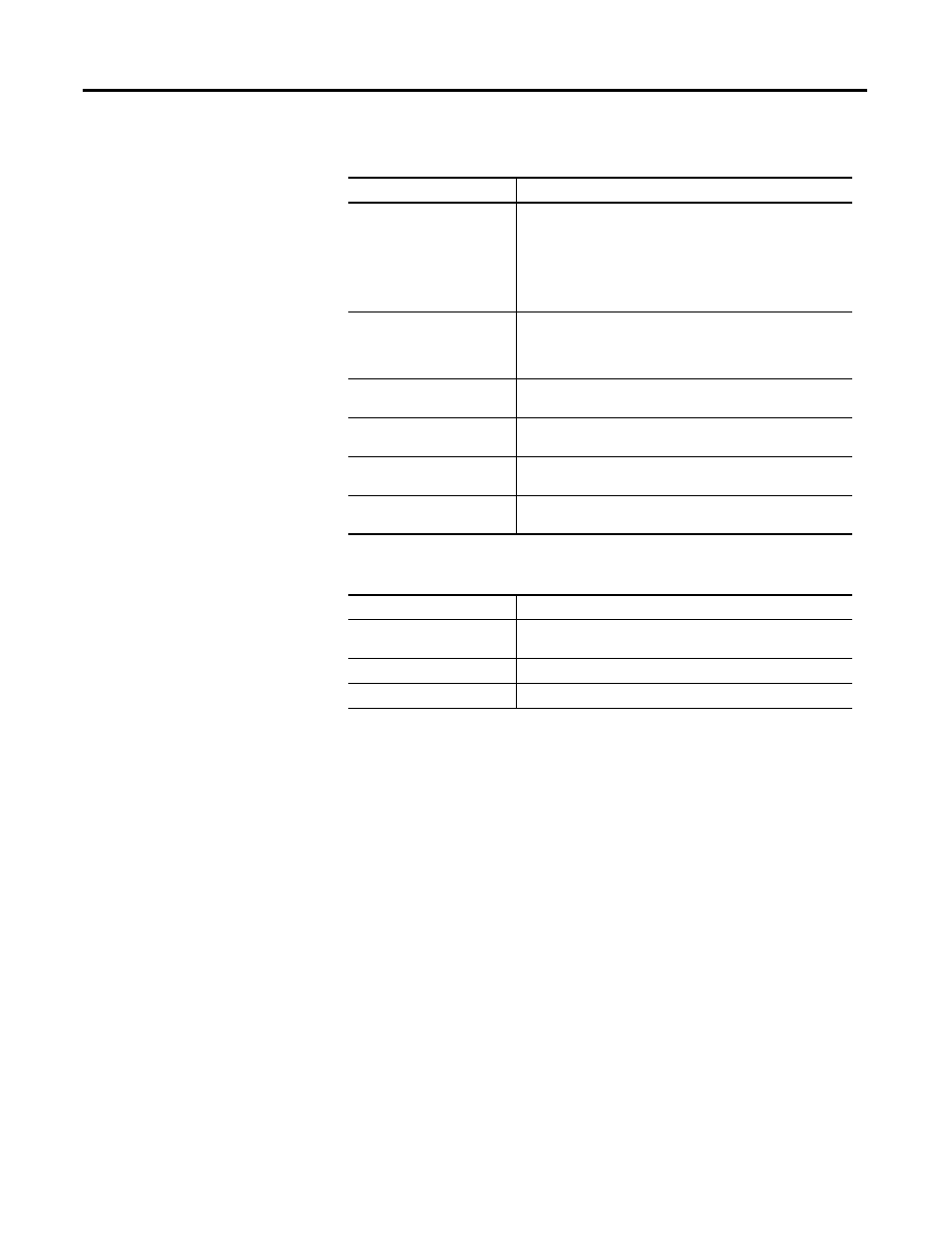
The following display is the default status for a Move branch of an online drive.
The following commands can be executed for a Move branch of an online drive.
Customize the Move window for your Ultra5000 Drive by selecting one or more
of these commands:
•
Click the Show Status to display or hide the Status pane.
•
Click the Show Commands to display or hide the Commands pane.
•
Click Setup to open the Monitor Setup window, where you can customize
the status display for this window.
•
Click Revert to return parameter settings to the values they held when you
opened this window.
Status
Description
State
Describes the relation between the move’s Program and Current
Velocity, as follows:
• Idle: No move is in progress.
• Profiling: The move is in progress.
• Calculating: Preparing to move according to a corrected move
command.
• Correcting: Corrected move is in progress.
Floating Zero
In the event that the Current Position value is changed by the
execution of a program (.exe) file, the value of this field changes
so that the sum of Floating Zero and Current Position remains
unchanged.
Current Position
The position, in counts, generated by the current move. This
value is automatically reset to zero at drive powerup.
Current Velocity
The velocity command, in counts per second, generated by the
current move.
Current Acceleration
The acceleration command, in counts per second squared,
generated by the current move.
Current Jerk
The rate of change of acceleration, in counts per second
squared.
Command
Description
Start
Spins the motor, ramping up at the Acceleration rate to the set
Velocity, and begins or resumes the move.
Stop
Brings the motor to a stop, using the set Deceleration rate.
Abort
Brings the motor to an immediate stop.