Rockwell Automation 2098-UWCPRG Ultraware Software User Manual User Manual
Page 290
292
Rockwell Automation Publication 2098-UM001G-EN-P - February 2011
Chapter 5 Configuring the Kinetix 3 Drive
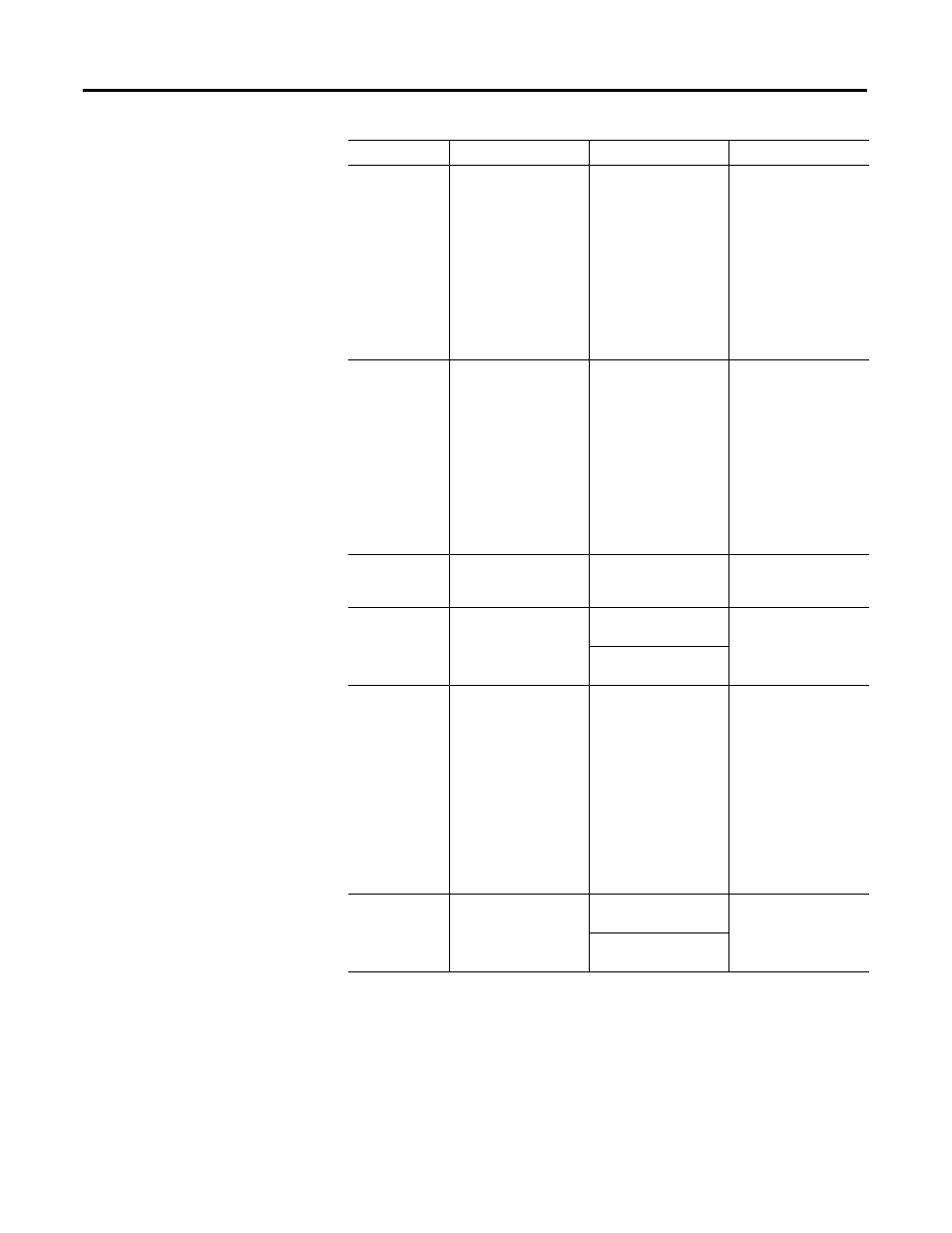
E.022 E.ConoL Motor
Continuous
Current Overload
The internal filter
protecting the motor
from overheating has
tripped.
• Reduce acceleration
rates.
• Reduce duty cycle
(ON/OFF) of
commanded motion.
• Increase time
permitted for motion.
• Use larger drive and
motor.
• Checking tuning.
E.023 E.druoL
Drive Overload
The motion application
requires average drive
current in excess of rated
capability.
• Reduce acceleration
rates.
• Reduce duty cycle
(ON/OFF) of
commanded motion.
• Increase time
permitted for motion.
• Use larger drive and
motor.
• Check tuning.
E.027 E.notHN
Axis Not Homed
Absolute positioning
attempted without
homing.
Verify homing position.
E.028 E.EnCdE Encoder
Data
Range
Error
Encoder not programmed
correctly
Replace motor
Encoder memory
corrupted
E.030 E.EnCoP
Encoder Cable Open
Communication is not
established with an
intelligent encoder.
• Verify the motor
configuration is for an
intelligent encoder.
• Verify the motor has
an intelligent encoder.
• Verify continuity of the
DATA+ and DATA-
signal wires.
• Verify encoder power
is present.
• Replace the motor.
E.031 E.EnCPE Encoder
Data
Parameter
Error
Encoder not programmed
correctly
Replace motor.
Encoder memory
corrupted
Status Description Possible Cause
Suggested Action