Rockwell Automation 2098-UWCPRG Ultraware Software User Manual User Manual
Page 209
Rockwell Automation Publication 2098-UM001G-EN-P - February 2011
211
Configuring the Ultra5000 Drive Chapter 4
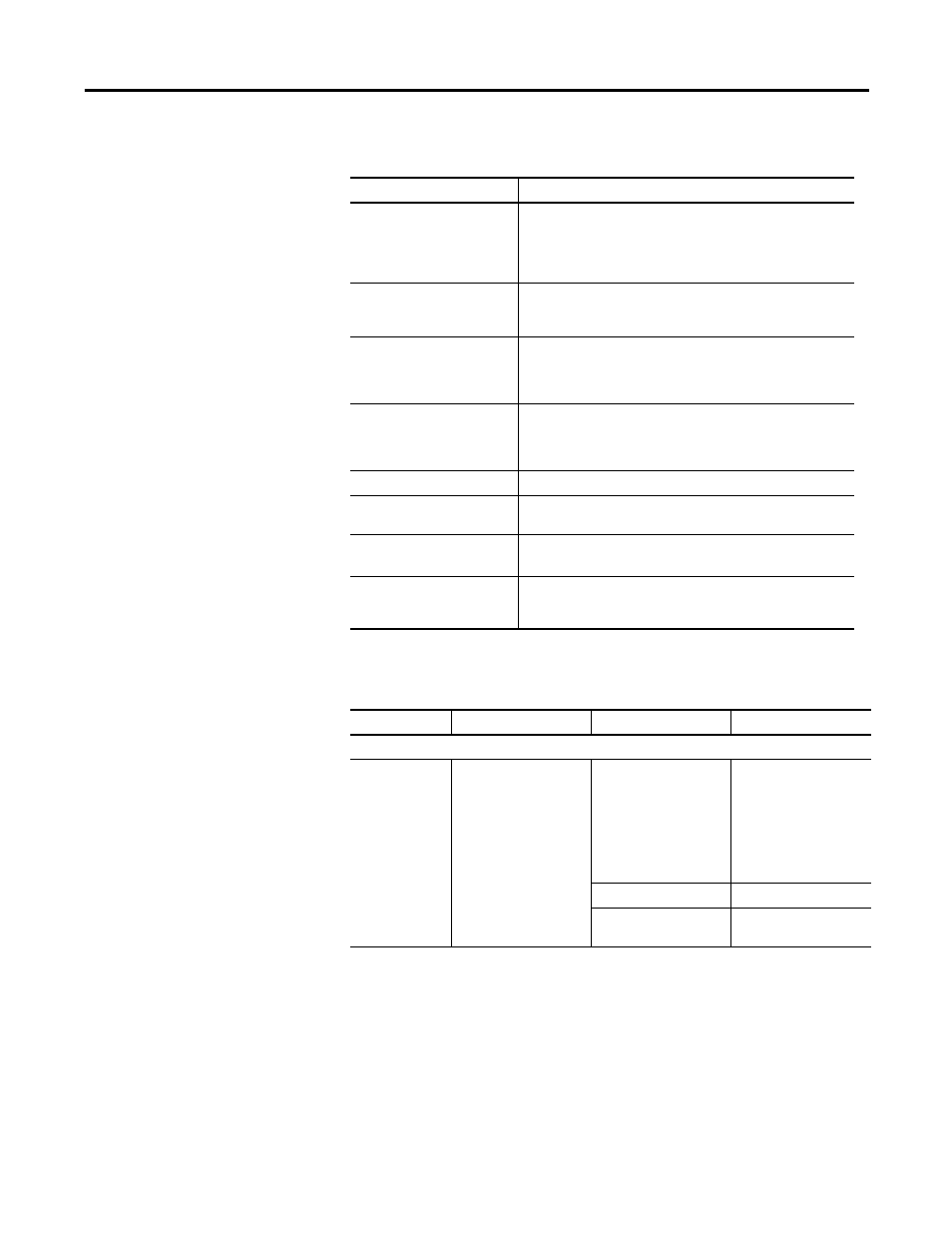
The following parameters can be entered and edited in the Faults window.
The following status is displayed by default for the Faults branch of an online
drive.
Parameter
Description
User Current Fault
The level, in amperes, that generates a fault when exceeded by
the average current level. The drive always protects itself and
the motor from average currents that exceed their ratings. This
value is needed only if a lower average current fault is desired
(For example, if another part of a machine would overheat).
User Current Fault Enable
The status of the User Current Fault detection:
• Enabled: turns on User Current Fault detection by the drive, or
• Disabled: turns off User Current Fault detection by the drive.
User Velocity Fault
The minimum velocity which causes the User Velocity fault. The
drive always protects the motor from exceeding its ratings. This
value is needed only if a lower velocity fault is desired. (For
example, if another part of a machine could be damaged.)
User Velocity Fault Enable
The state of the User Velocity Fault:
• Enabled: turns on User Velocity Fault detection by the drive,
or
• Disabled: turns off User Velocity Fault detection by the drive.
Velocity Error Limit
The minimum velocity error that triggers the Velocity Error fault.
Velocity Error Time
The minimum time which the velocity error must be greater than
the Velocity Error Fault Limit to cause a Velocity Error fault.
Following Error Limit
The minimum position error that triggers the Following Error
fault.
Following Error Time
The minimum time during which the position error must be
greater than the Following Error Fault Limit to cause a Following
Error fault.
Status
Description
Possible Cause
Suggested Action
Note: The value of status that are ‘ON’ = 1. The value of status that are OFF = 0.
04: Motor
Overtemp
ON indicates the motor
thermostat has tripped.
Motor thermostat trips
due to high motor
ambient temperature,
excessive current, or
both.
• Operate within (not
above) the continuous
torque rating for the
ambient temperature
(40ºC maximum).
• Lower ambient
temperature, increase
motor cooling.
Motor wiring error
Check motor wiring.
Incorrect motor selection
Verify the proper motor
has been selected.