Rockwell Automation 2098-UWCPRG Ultraware Software User Manual User Manual
Page 167
Rockwell Automation Publication 2098-UM001G-EN-P - February 2011
169
Configuring the Ultra5000 Drive Chapter 4
Together, these gain regulators provide software control over the servo dynamics,
and let the servo system stabilize.
You can edit parameters for both an online and an offline Tuning branch.
However, you can monitor status and execute direct commands (executed
through the Ultraware interface, rather than through a compiled, loaded and
executed program) only for a Tuning branch that is the child of an online drive.
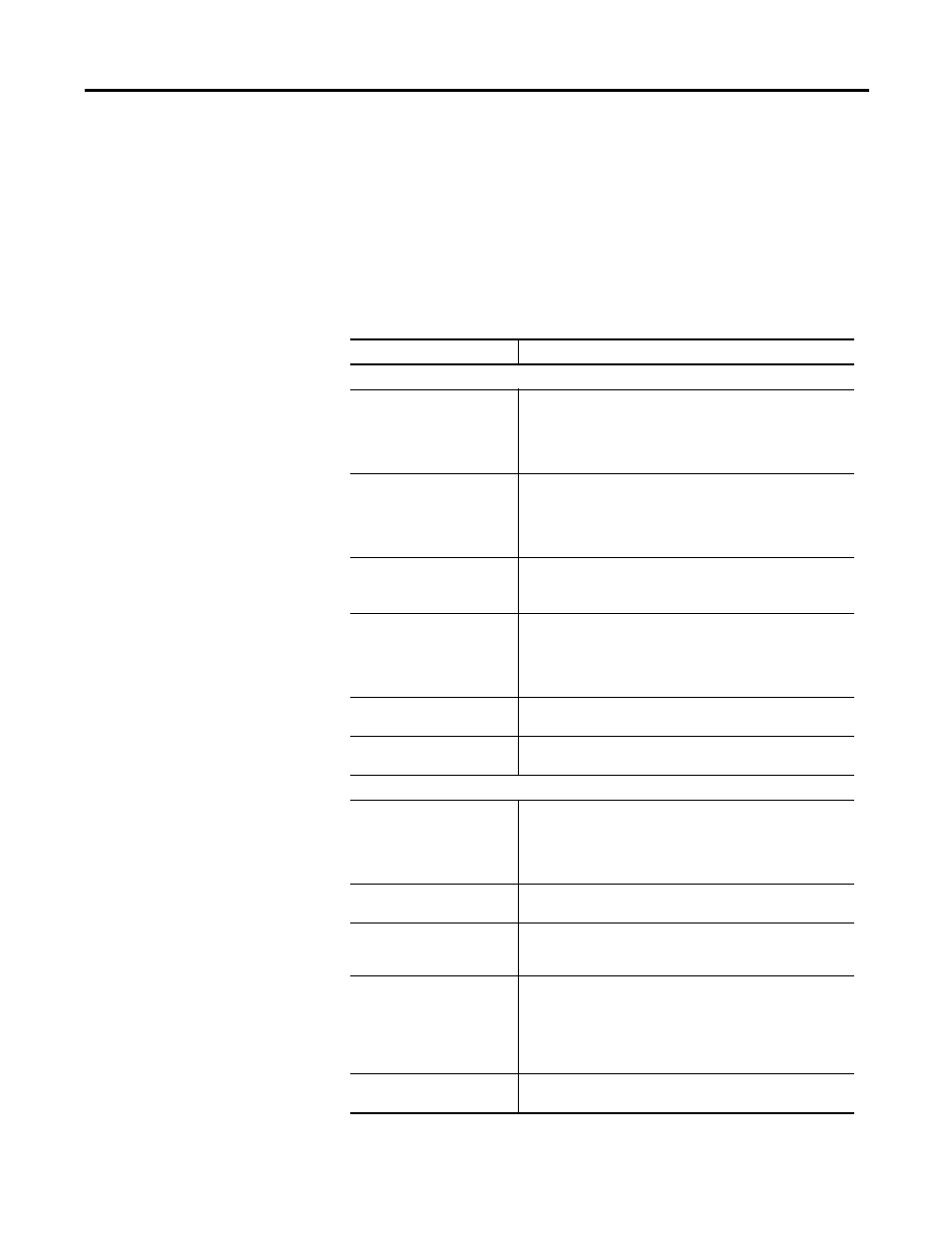
The following parameters can be entered and edited in the Tuning window.
Parameter
Description
Velocity Regulator Gains
P
Proportional gain for the velocity loop. Must be >= 0.
Increasing the P gain improves response time and increases the
stiffness of the system. Too high a P gain value causes
instability; too low a P gain value results in loose or sloppy
system dynamics.
I
Integral gain for the velocity loop. Must be >= 0.
I gain improves the steady-state velocity performance of the
system. Increasing the integral gain generally increases the
ultimate positioning accuracy of the system. However excessive
integral gain results in system instability.
FF
Acceleration feedforward gain. Must be >= 0.
FF gain reduces velocity following error. However, high values
can cause velocity overshoot.
Bandwidth
Lowpass output filter bandwidth. Valid values range from
0…2000 Hz.
Bandwidth reduces noise generated by encoder resolution or
mechanical resonance in the system. Setting to zero disables
filtering.
Upper Limit
The maximum positive current the drive may output to the motor,
in amperes. Must be >= 0.
Lower Limit
The maximum negative current the drive may output to the
motor, in amperes. Must be <= 0.
Position Regulator Gains
Kp
Proportional gain for the position loop. Must be >= 0.
Increasing the Kp gain improves response time and increases
the stiffness of the system. Too high a Kp gain value causes
instability; too low a Kp gain value results in loose or sloppy
system dynamics.
Kpz
Proportional gain for the position loop, when the position error
falls within the Kpz Zone (defined below). Must be >= 0.
Kpz Zone
Enter the region, in counts, around Command Position where
Kpz is used in place of Kp as the position loop proportional gain
value. Must be >= 0.
Ki
Integral gain for the position loop. Must be >= 0.
Ki gain improves the steady-state positioning performance of
the system and virtually eliminates steady-state positioning
errors. Increasing the integral gain generally increases the
ultimate positioning accuracy of the system. However excessive
integral gain results in system instability.
Ki Zone
Enter the region, in counts, around Command Position where
integral gain is active. Must be >= 0.