B.2.3 representing the parameter entries – Festo Электромотор MTR-DCI User Manual
Page 237
B. Reference – Festo Handling and Positioning Profile (FHPP)
B-19
Festo P.BE-MTR-DCI-CO-EN en 1209a
B.2.3
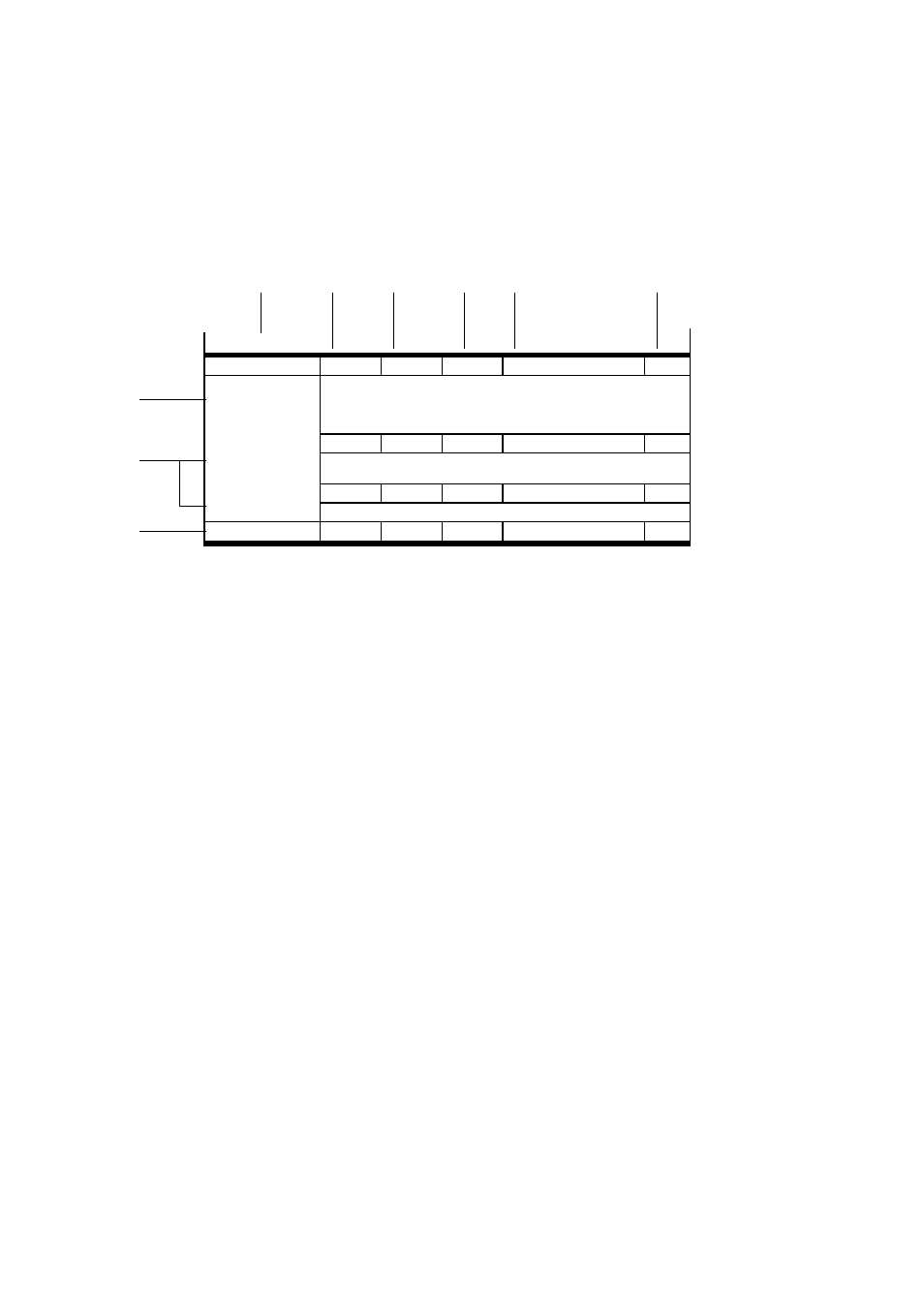
Representing the parameter entries
Encoder resolution
FHPP
1001
1...2
Array
uint32
rw
Description
Encoder resolution in increments / revolutions
The encoder resolution is fixed and cannot be modified by the user. The
calculated value is derived from the fraction (encoder-increments/motor
revolution).
Encoder increments
(encoder increments)
1001
1
uint32
rw
Value range: 0 ... 2
32
-1
Default: 500
Motor revolutions
(motor revolution)
1001
2
uint32
rw
Fix = 1
CANopen / CI
608Fh
01h...02h
Array
uint32
rw
1
Name of the parameter in English (German in brackets)
2
PNU (parameter number PDO)
3
Subindices of parameter, if present (–: no subindex, simple variable)
4
Element class
5
Element variable type.
6
Read/write permission: ro = read only, wo = write only, rw = read and write,
rw = read and write at any time,
rw = read and write during commissioning
7
Description of the parameter
8
Name and description of the subindices, if available (specification related to FHPP,
if available)
9
Corresponding and CANopen or CI object, if present
Fig. B/6: Representing the parameter entries
1
2
3
4
5
6
7
8
9