Festo Электромотор MTR-DCI User Manual
Page 234
B. Reference – Festo Handling and Positioning Profile (FHPP)
B-16
Festo P.BE-MTR-DCI-CO-EN en 1209a
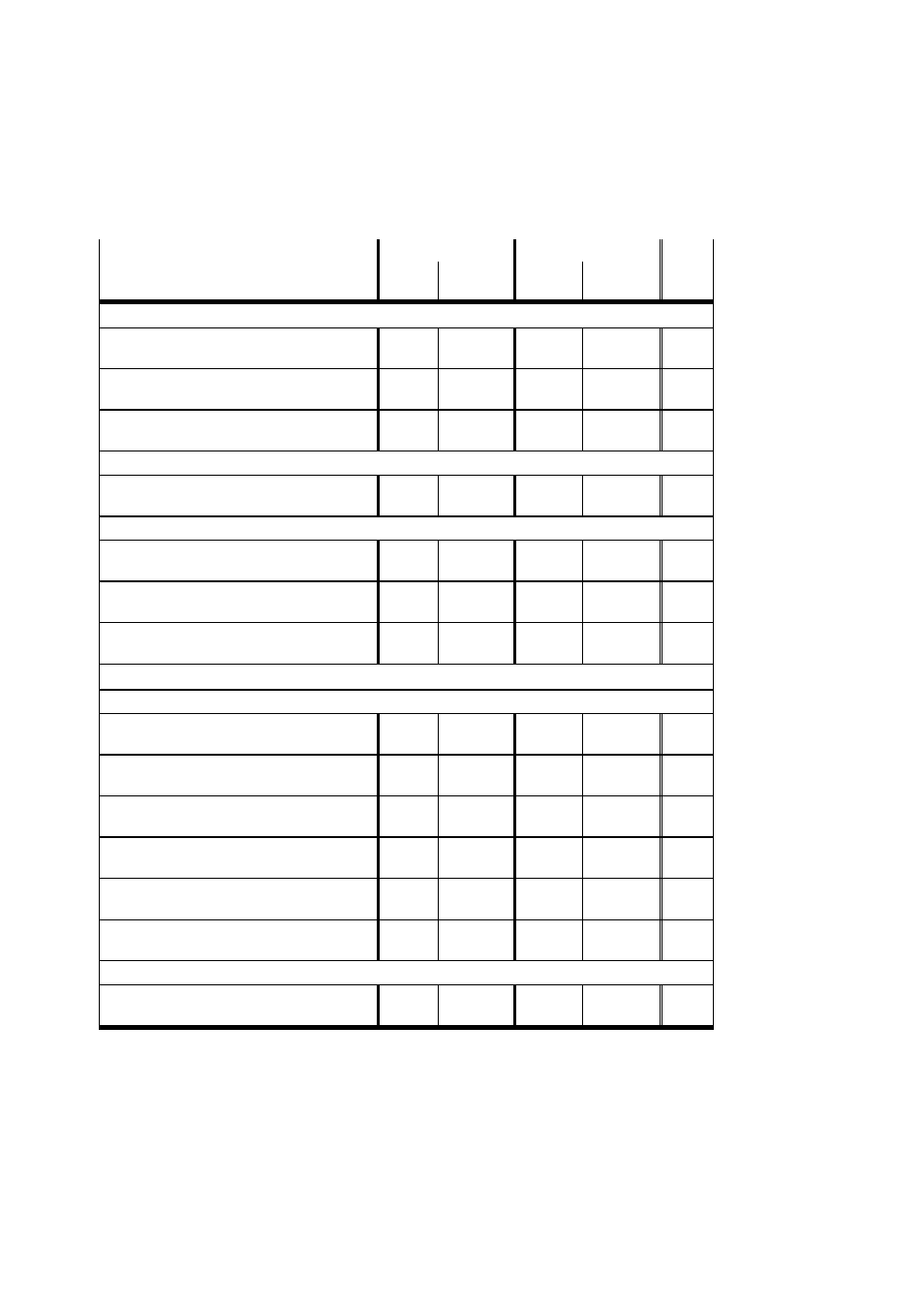
Name
see
CANopen / CI
FHPP
Name
see
SI
Object
SI
PNU
Object
Project data – Jog mode (see section B.2.12)
Jog Mode Velocity Phase 2
531
2213h
–
20EDh
21h
B.2.12
Jog mode acceleration
532
2214h
–
20EEh
21h
B.2.12
Jog mode time phase 1
534
2216h
–
20E9h
00h / 21h
B.2.12
Project data – Direct mode (positioning mode) (see section B.2.13)
Direct mode acceleration
541
221Dh
–
20EEh
22h
B.2.13
Project data – Direct mode (force mode) (see section B.2.14)
Force target window
552
2228h
–
60F6h
03h
B.2.14
Damping time
553
2229h
–
60F6h
04h
B.2.14
Speed limit
554
222Ah
–
60F6h
02h
B.2.14
Axis data electric drives 1
Axis data electric drives 1 – mechanical (see section B.2.15)
Polarity
1000
23E8h
–
607Eh
– / 00h
B.2.15
Encoder resolution
1001
23E9h
1, 2
01h, 02h
608Fh
01h, 02h
B.2.15
Gear ratio
1002
23EAh
1, 2
01h, 02h
6091h
01h, 02h
B.2.15
Feed constant
1003
23EBh
1, 2
01h, 02h
6092h
01h, 02h
B.2.15
Position factor
1004
23ECh
1, 2
01h, 02h
6093h
01h, 02h
B.2.15
Axis parameter
1005
23EDh
1...5
01h...05h
20E2h
01h...05h
B.2.15
Axis data electric drives 1 – Homing (see section B.2.16)
Offset axis zero point
1010
23F2h
–
607Ch
– / 00h
B.2.16