Festo Электромотор MTR-DCI User Manual
Page 142
5. Commissioning
5-44
Festo P.BE-MTR-DCI-CO-EN en 1209a
CPOS
Control byte 2 (CPOS) controls the positioning sequences as
soon as the drive is enabled.
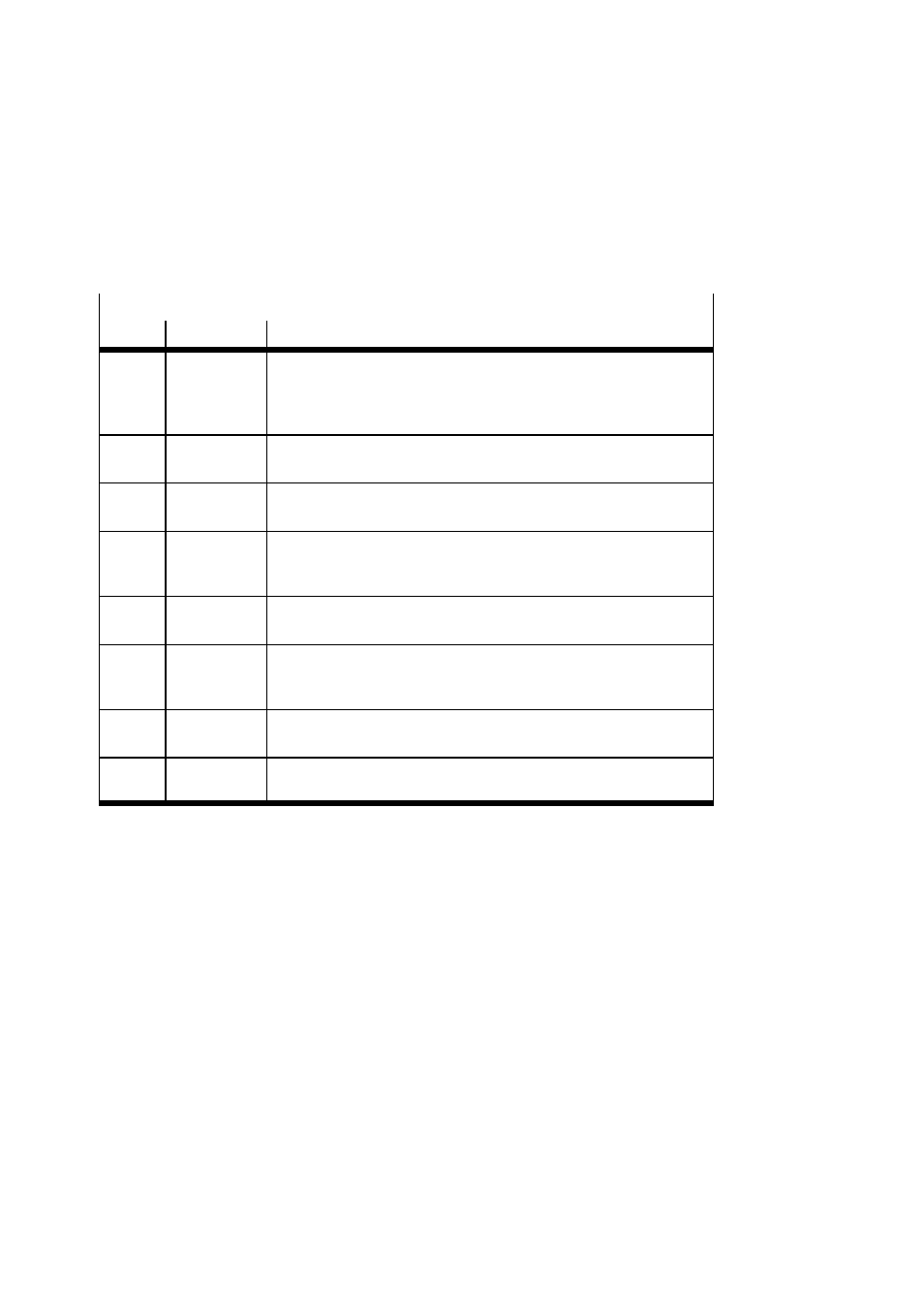
Control byte 2 (CPOS)- Record select and Direct mode
Bit
EN
Description
B0
HOLD
Hold
= 1: Hold is not active
= 0: Hold activated (do not cancel braking ramp + positioning task).
The axis stops with a defined braking ramp, the positioning task
remains active (with B6 the remaining path can be deleted).
B1
START
Start positio-
ning task
With a
rising edge the current nominal values will be transferred and
positioning started (record 0 = reference travel).
B2
HOM
Start
homing
With a
rising edge homing is started with the set parameters.
B3
JOGP
Jog positive
The drive moves at the specified velocity or rotational speed in the direc-
tion of larger actual values, providing the bit is set. The movement be-
gins with the rising edge and ends with the falling edge.
B4
JOGN
Jog negative
The drive moves at the specified velocity or rotational speed in the direc-
tion of smaller actual values, see bit 3.
B5
TEACH
Teach actual
value
At a
falling edge the current actual position is imported into the setpoint
register of the currently addressed positioning set; see section 5.6.3.
The Teach target is defined with PNU 520.
B6
CLEAR
Clear remai-
ning position
In the “Hold” status a
rising edge causes the positioning task to be
deleted and transfer to the status “Ready.”
B7
–
–
reserved
:=0