IAI America RCM-101-USB User Manual
Page 68
5. Editing Position Data on CON Controllers and Older Models
56
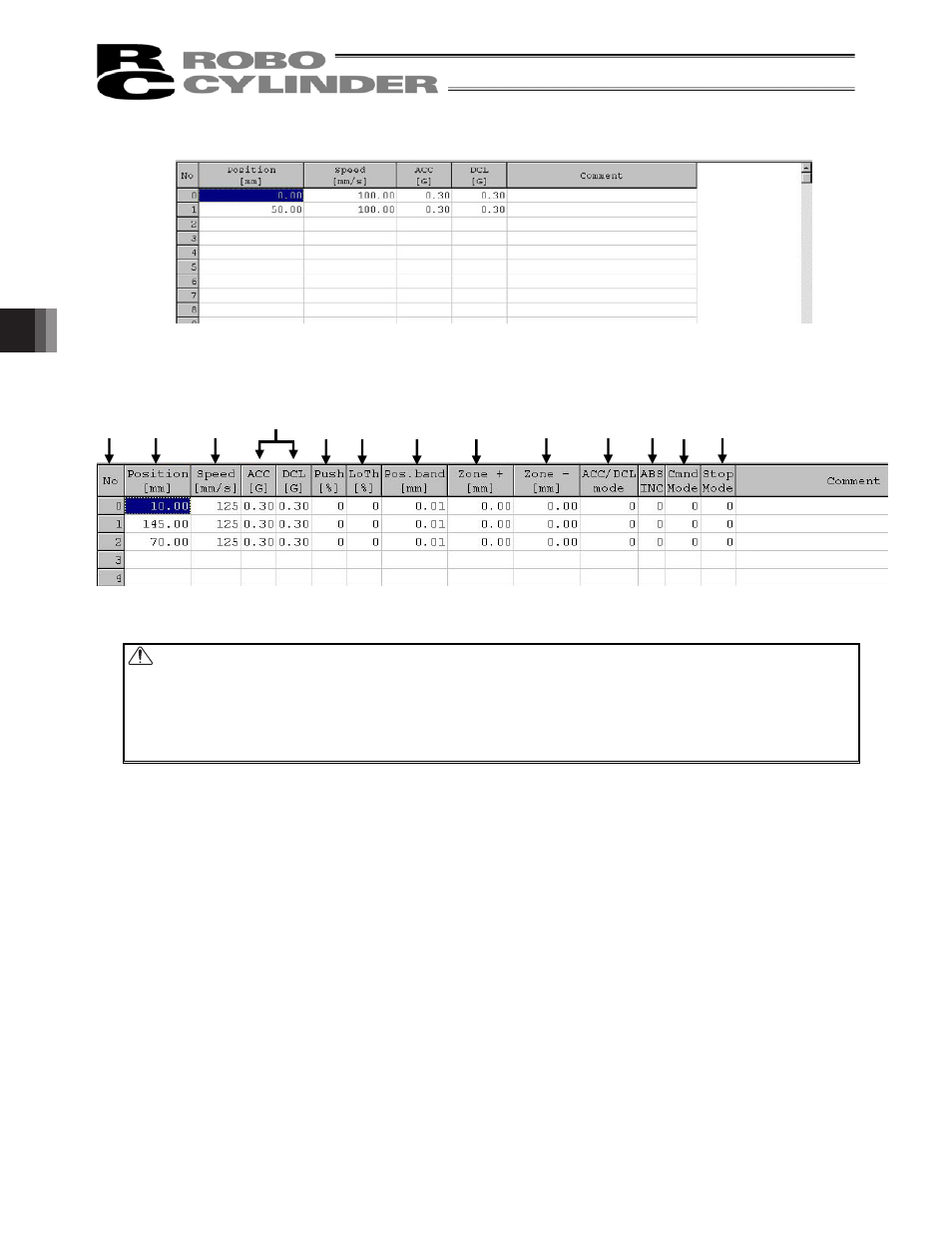
Fig. 5.25 Position Data Input Area (Normal Mode)
Fig. 5.26 Position Data Input Area (Detail Mode)
[1] No.:
Indicates the position data number.
Warning: In the case of a PCON-C/CG/CF, PCON-CA, ACON-C/CG, SCON, ROBONET, ERC3 PIO
Converter or MSCON (remote I/O mode) controller operating in solenoid mode 2 or
PCON-CY or ACON-CY controller operating in solenoid mode 0, be sure to use absolute
coordinates. If relative coordinates are used, position data errors will occur.
Also note that if relative coordinates are used on any of these controllers operating the
specified push mode, completion of push operation cannot be determined.
[2] Position: Input the target position to move the actuator to, in [mm].
Absolute Coordinates (Incremental:0) : Input the target location by determining the
distance between the original point and target
position. No negative value can be input.
Relative Coordinates (Incremental:1) : Input the target location by determining the
distance between the current position and target
position. Any negative value can be input (if
coordinates are in the negative direction).
[3] Vel:
Input the speed at which the actuator will be moved, in [mm/sec].
The initial value will depend on the actuator type.
(Note) For SCON-CA, PCON-CA, ERC3 and MSCON, an alarm will be displayed if the
set value is lower than the minimum velocity.
[1]
[2]
[3]
[4]
[5] [6]
[7]
[8]
[9]
[10] [11] [12] [13]