4 starting the software – IAI America RCM-101-USB User Manual
Page 38
1. Preparation Before Use
26
1.4 Starting the Software
[1] Turn off the power to the controller and PC, and connect the controller to the PC using the standard
RS232C cable or USB cable that comes with the software.
[2] Turn on the power to the controller and PC, and start Windows.
[3] If your controller has a port switch, turn the port switch ON before starting this software.
* This software judges whether the mode is online or offline depending on whether the controller and
personal computer are connected or not. A controller equipped with a PORT switch does not operate in
the online mode even if the port switch of the controller is turned ON after this software is started. In this
case, the online mode is turned on by performing [Reconnect] (Refer to 3.1 (5) [2] [Setting of controller]).
[4] A check for connected axis appears and a check for connected axis is started. (Refer to 2. Checking for
Connected Axes).
[In the case of PCON, ACON, SCON, ERC2, ERC3, ROBONET, ASEP, PSEP, DSEP,
MSEP and MSCON]
Before the connected axis is checked, the setting of communication window (Fig. 1.45) appears, but only when
the software is started for the first time after its installation. [Refer to 1.5, “Setting of Communication Window.”]
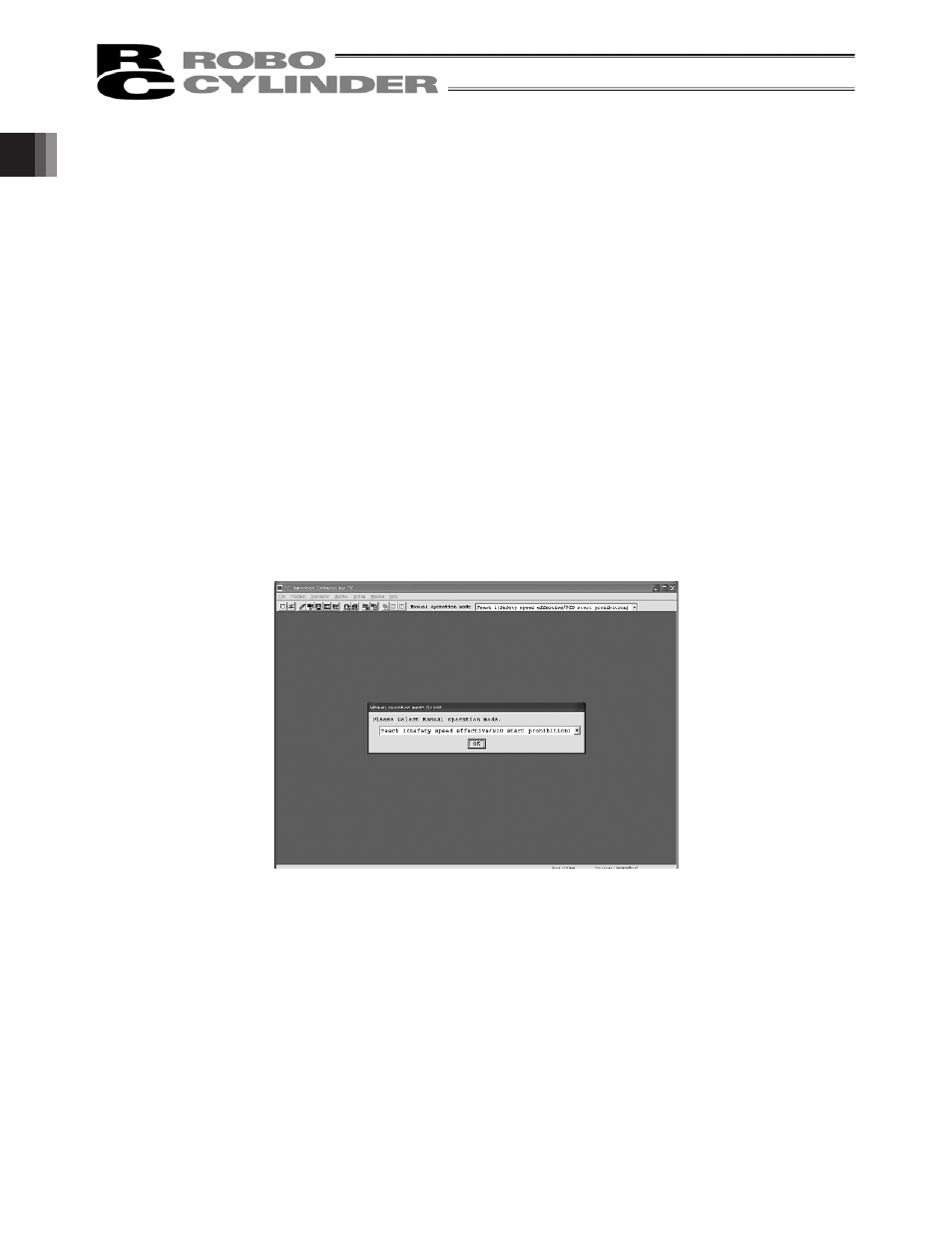
[5] When a check for the connected axis is completed, the main window is displayed, and at the same time, a
window to select Manual operation mode shown in Fig. 1.43 is displayed.
Select the operation mode according to the purpose and press
OK.
Hereinafter, select the operation mode according to the purpose of operation.
Fig. 1.43 Manual Operation Mode Select Window
Select the manual operation mode from the following four choices.
Teach mode 1 (Safety speed effective/PIO start prohibition)
PIO start prohibition:
Position data and parameter, etc., are allowed to be written in the controller
and actuator operation is commanded by the PC software (I/O ineffective).
Safety speed effective: Maximum speed becomes safety speed (set by a parameter) regardless of
speed designation of position data.
Teach mode 2 (Safety speed ineffective/ PIO start prohibition)
PIO start prohibition:
Position data and parameter, etc., are allowed to be written in the controller
and actuator operation is commanded by the PC software (I/O ineffective).
Safety speed ineffective: Allows operation at the speed set in the speed designation of the position data
table (safety speed or higher).