IAI America RCM-101-USB User Manual
Page 100
6. Initial Setting and Position Data Editing for SEP
Controllers
88
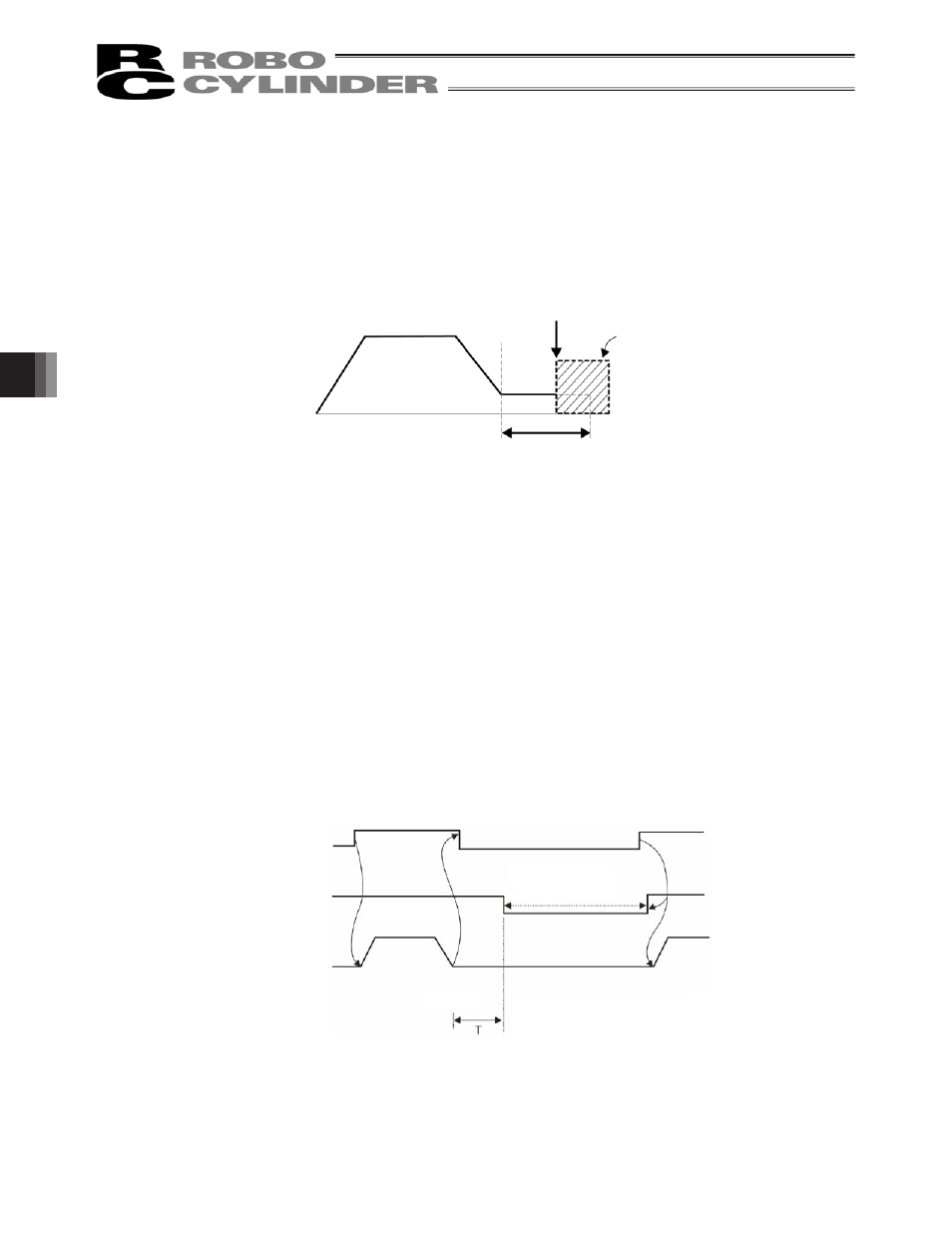
If CON method pressing is selected in MSEP Controllers, the maximum pressing
amount in the pressing operation from the target position needs to be defined in
Positioner Mode.
While considering the mechanical inconsistency of the work piece, set the
positioning band so the positioning would not end before the work piece gets
pressed towards the target.
[5] ACC······························Set the actuator acceleration.
The input range permits entry of a value greater than the value specified in the
catalog. However, you should set a value not exceeding the rated acceleration in
the catalog.
[6] DCL ······························Set the actuator deceleration.
The input range permits entry of a value greater than the value specified in the
catalog. However, you should set a value not exceeding the rated deceleration in
the catalog.
[7] Energy-saving Mode… When 1 “Enable” is set in the Energy-saving Mode field, the actuator will turn OFF
the servo automatically after elapse of a specified time. Since the holding current
does not flow while the actuator is stopped, the current consumption can be saved.
Once a move command is issued, the servo will turn ON again and the actuator
will start moving.
The time until the servo turns OFF is set by the parameter for auto servo OFF delay time.
Move command
Servo status
Actuator move
Servo ON
Servo automatically turned
OFF (Green LED blinking)
Target position
T: Delay after completion of positioning
until servo OFF (sec)
T is set by a parameter.
Position at which the position complete
signal turns ON when the actuator contacts
work part and push completion is judged
Target
position
Positioning band
(maximum push amount)
Work
part