Rockwell Automation 2071-Axx Kinetix 3 Component Servo Drive Serial Host Command Reference Manual User Manual
Page 87
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
87
Standard Drive Parameters
Appendix A
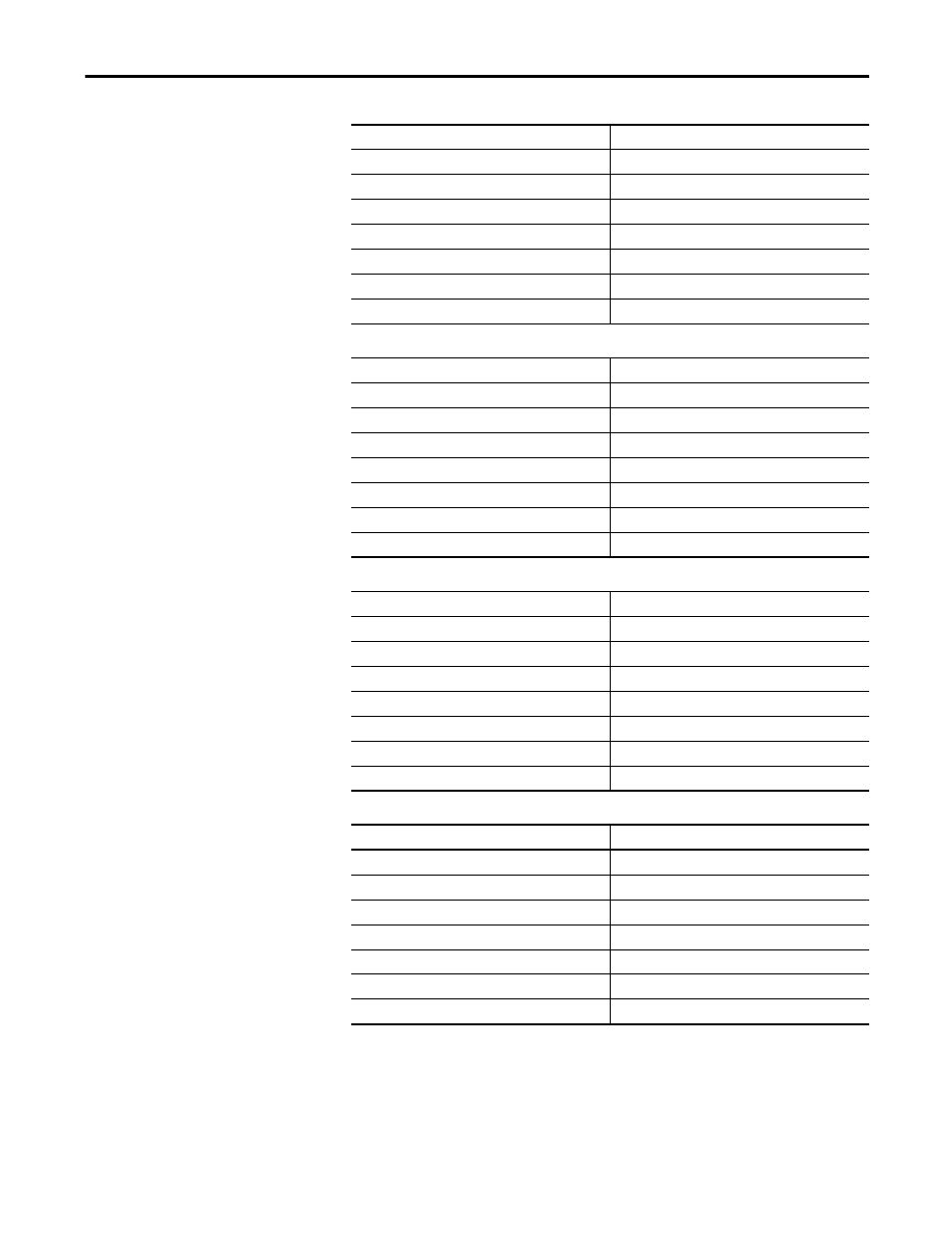
[Pr - 3.02]
1st Gear Ratio, Master Counts
Ultraware Name
1st Gear Ratio Denominator
Range
1…65,535
Default
1
Units
When Enabled
Servo-Off -> Setting
Applicable Operating Mode
Follower
Modbus Address
[Pr - 3.03]
Encoder Output Ratio, Output Counts
Ultraware Name
Output Ratio Numerator
Range
1…32,768
Default
1
Units
When Enabled
Servo-Off -> Setting
Applicable Operating Mode
All
Modbus Address
[Pr - 3.04]
Encoder Output Ratio, Motor Counts
Ultraware Name
Output Ratio Numerator
Range
1…32,768
Default
1
Units
When Enabled
Servo-Off -> Setting
Applicable Operating Mode
All
Modbus Address
[Pr - 3.05]
2nd Gear Ratio, Follower Counts
Ultraware Name
2nd Gear Ratio Numerator
Range
1…65,535
Default
4
Units
When Enabled
Servo-Off -> Setting
Applicable Operating Mode
Follower
Modbus Address