Group 3 - position control – Rockwell Automation 2071-Axx Kinetix 3 Component Servo Drive Serial Host Command Reference Manual User Manual
Page 85
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
85
Standard Drive Parameters
Appendix A
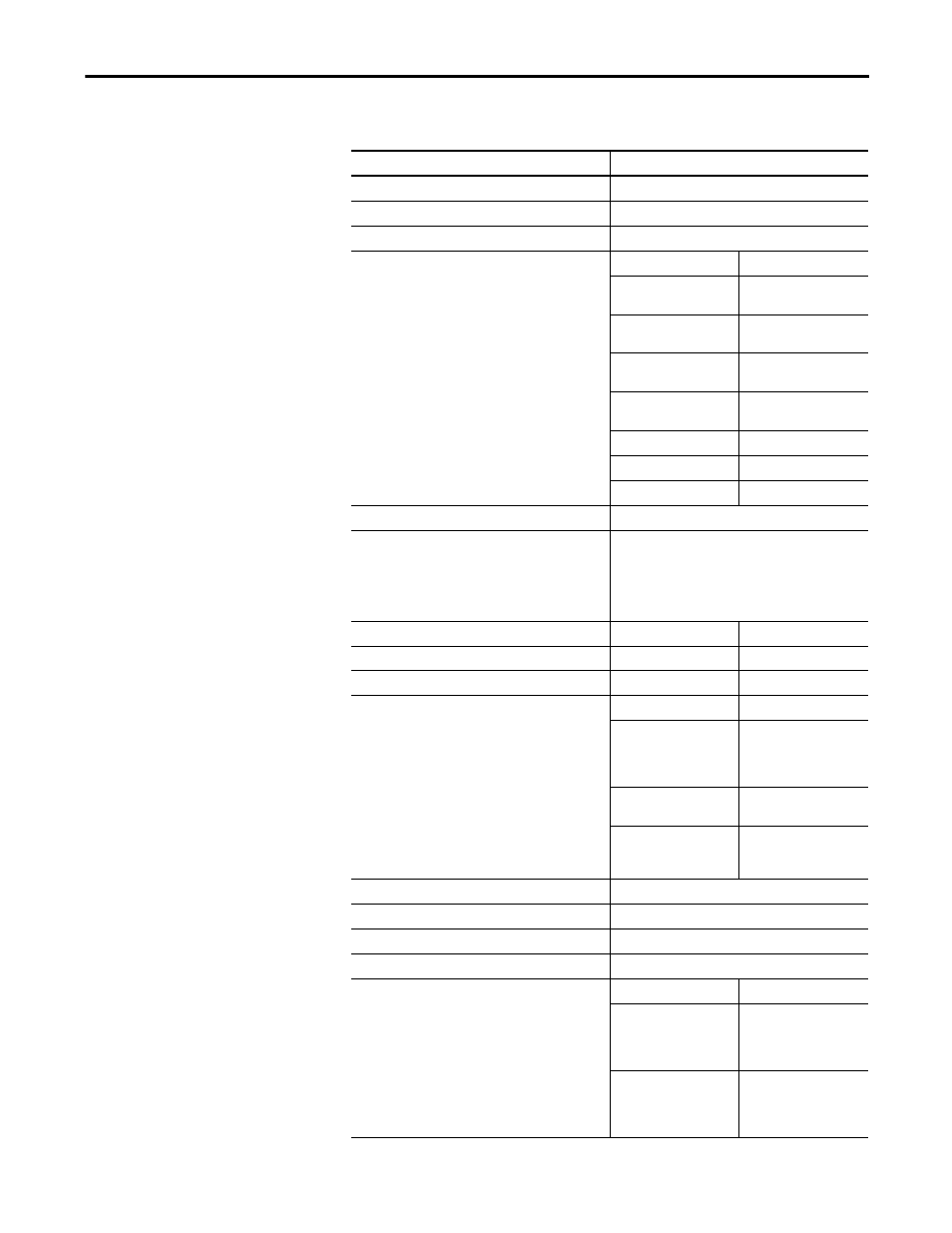
Group 3 - Position Control
[Pr - 3.00]
Follower
Data Size
4 digits
Digit 0
Command Type
Ultraware Name
Command Type
Range
Value
Description
0x0
Step Up/Step Down,
Positive logic
0x1
Step Up/Step Down,
Negative logic
0x2
Step/Direction, Positive
Logic
0x3
Step/Direction, Negative
Logic
0x4
Auxiliary Encoder, x1
0x5
Auxiliary Encoder, x2
0x6
Auxiliary Encoder, x4
Default
0x0
Note
For Command types 0x4, 0x5, and 0x6:
Motor Counts = Master Lines * MULT * ……
…. (4 * Para3.01) / Para3.02
where MULT is 1, 2 or 4 for command types 0x4, 0x5 and
0x6 respectively.
Applicable Operating Mode
Follower
Digit 1
Controller Output Type
Ultraware Name
Controller Output Type
Range
Value
Description
0x0
Use Low speed Line Drive
Output in Host Controller
for isolated electrical
connection.
0x1
Use Open Collector in Host
Controller.
0x2
Use High Frequency Line
Drive Output in Host
Controller.
Default
0x0
Applicable Operating Mode
Follower
Digit 2
Encoder Output Forward Direction
Ultraware Name
Encoder Output Forward Direction
Range
Value
Description
0x0
During Forward Rotation,
Encoder Output Phase A
have a lead of 90º over
Phase B.
0x1
During Forward Rotation,
Encoder Output Phase B
have a lead of 90º over
Phase A.