Rockwell Automation 2071-Axx Kinetix 3 Component Servo Drive Serial Host Command Reference Manual User Manual
Page 72
72
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Appendix A
Standard Drive Parameters
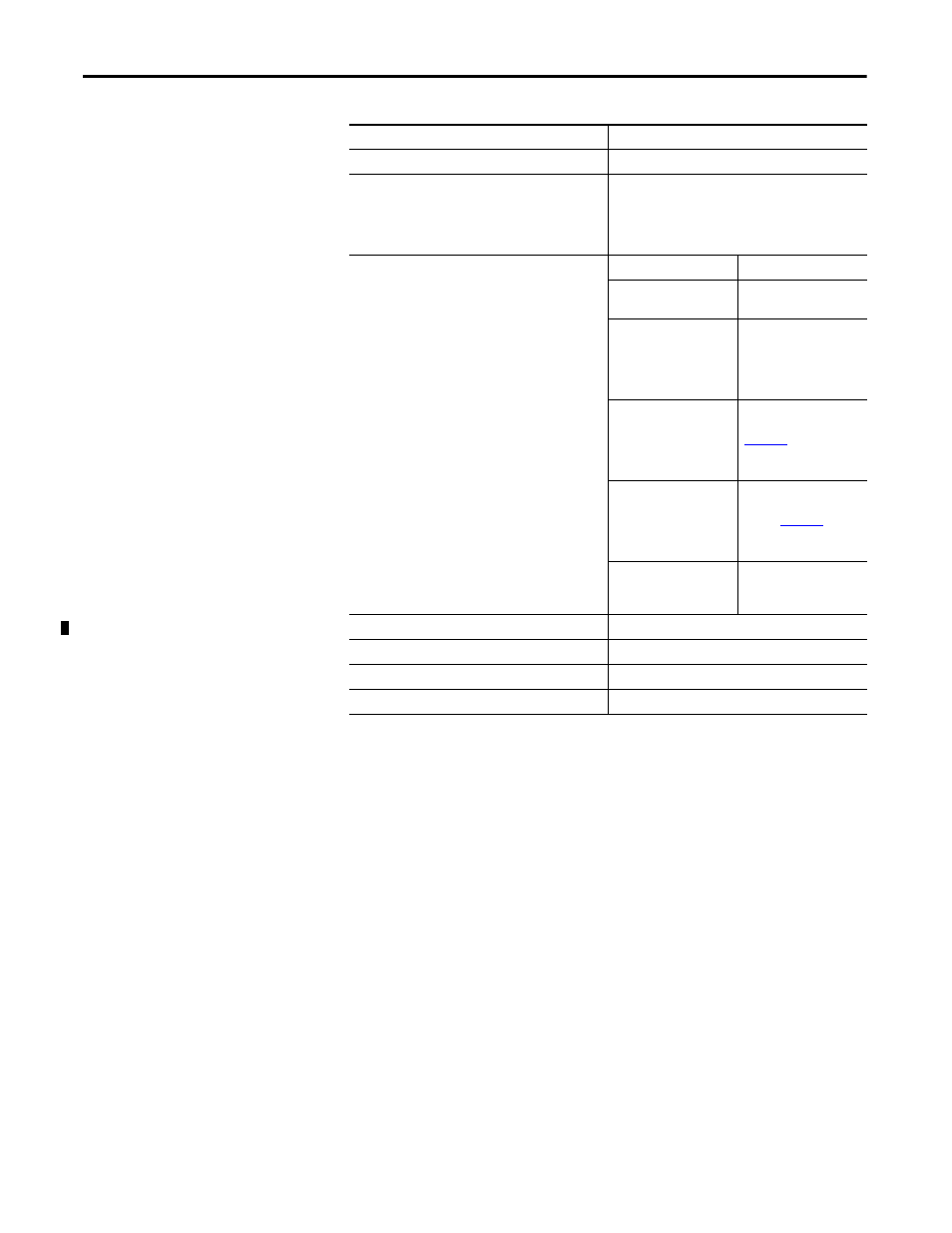
[Pr - 1.17]
Velocity Regulator I Gain Mode
Ultraware Name
Main Velocity Regulator Gains: I Gain Mode
Description
During transient response, Speed Response Overshoot can
be suppressed by a speed controller change from a
Proportional Integral (PI) controller into a Proportional (P)
controller. It reduces position completion time during
position control.
Range
Value Description
0x0
Do not use P/PI Mode
Conversion.
0x1
When Current Command
exceeds Current Value in
[Pr - 1.18], Speed
Controller is changed from
PI Controller to P Controller.
0x2
When Speed Command
exceeds Speed Value in
[Pr - 1.18]
, Speed
Controller is changed from
PI Controller to P Controller.
0x3
When Position error
exceeds Position error
Value in
[Pr - 1.18]
, Speed
Controller is changed from
PI Controller to P Controller.
0x4
Automatically velocity
controller is changed from
PI Controller to P Controller.
Default
0
When Enabled
Servo-Off -> Setting
Applicable Operating Mode
All
Modbus Address