Rockwell Automation 2071-Axx Kinetix 3 Component Servo Drive Serial Host Command Reference Manual User Manual
Page 61
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
61
Standard Drive Parameters
Appendix A
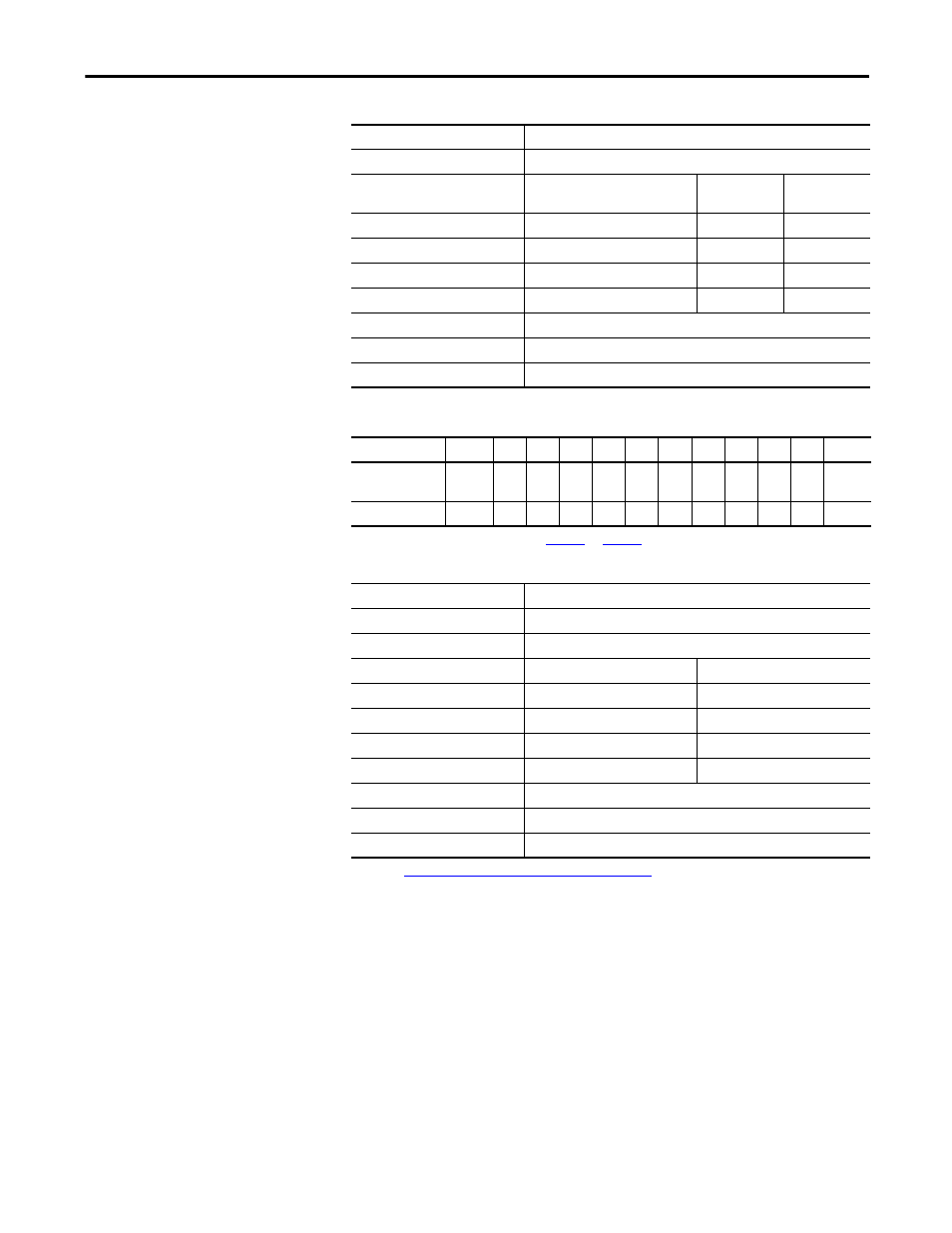
Table 1 - Setting Values for Parameters [Pr - 0.10]…[Pr - 0.21]
[Pr - 0.21]
Allocation of Input Signals 12
Data Size
4 digits
Digit
Description
Default
Unmapped IO
Status
0
Reserved 0x0
OFF
1
Reserved
0x0
OFF
2
Reserved 0x0
OFF
3
Reserved
0x0
OFF
When Enabled
Reserved
Applicable Operating Mode
Indexing
Modbus Address
Setting Value
(1)
(1) Setting values are reserved (not available) for
[Pr - 0.19]
and
[Pr - 0.20]
.
B
A
9
6
7
6 5 4 3 2 1 0
Input Channel No.
Input
Signal
19 9 8 7 6 5 4 3 2 1 Input
Signal
CN1
Pin
No.
On 26 27 29 9 8 7 6 5 4 3 Off
[Pr - 0.22]
Allocation of Output Signals 1
Range for all digits
0…3, where 0 is Off and 1…6 are digital outputs
Data Size
4 digits
Digit
Description
Default
0
Within position window (P-COM)
0x1
1
Up to speed (TG-ON)
0x2
2
Brake control (BK)
0x3
3
Within speed window (V-COM)
0x0
When Enabled
Servo-Off -> Setting
(1)
(1) Refer to
Setting Values for Parameters [Pr - 0.22]…[Pr - 0.32] on page 66
Applicable Operating Mode
All
Modbus Address