Running parameter (function code 0x06 or 0x10) – Rockwell Automation 2071-Axx Kinetix 3 Component Servo Drive Serial Host Command Reference Manual User Manual
Page 26
26
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Chapter 1
Modbus Protocol
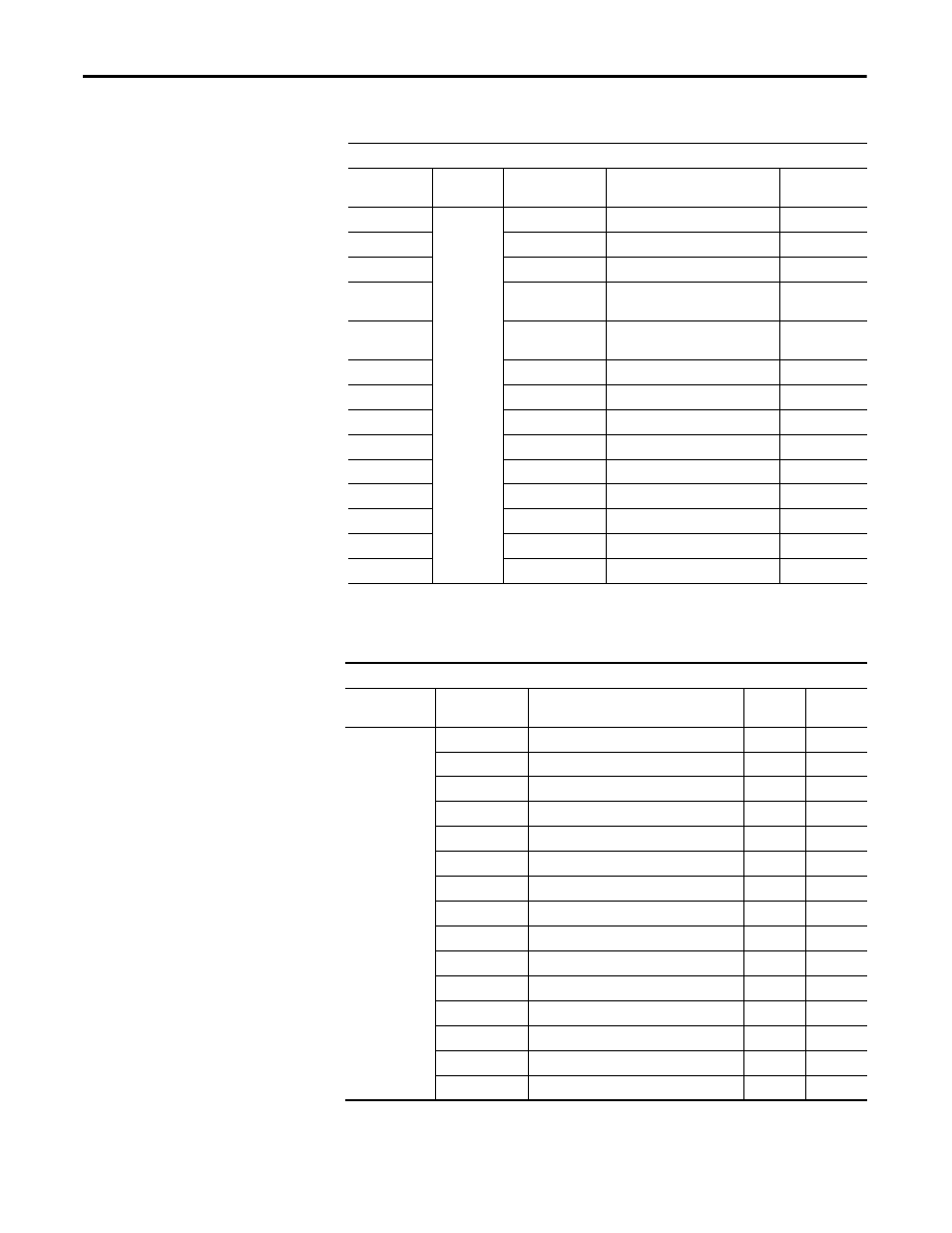
Running Parameter (Function Code 0x06 or 0x10)
Input Function Parameter (Function Code 0x03, 0x06, or 0x10)
Run Parameter - Holding Registers (Default = 2000)
Modbus
Address
Attribute
RUN
Name
Access Unit
2000
User Open
run-00
Jog Operation
1-byte
2001
run-01
Off-Line Auto Tuning
1 bit
2002 run-02
Reserved -
2003
run-03
Auto Adjustment of Speed Command
Offset
1 bit
2004
run-04
Auto Adjustment of Current
Command Offset
1 bit
2005…2007 run-05…
run-07
Reserved
-
2008 run-08
Alarm
Reset
1
bit
2009 run-09
Reserved -
2010
run-10
Absolute Encoder Reset
1 bit
2011
run-11
2-Group Gain Storing
1 bit
2012 run-12
Parameter
Initialization
1
bit
2013…2015 run-13…run-15
Reserved
-
2016 run-16
Hardware
Reset
1
bit
2017…2099
run-17…run-99
Reserved
-
Input Function Control - Holding Registers
Modbus
Address
I/O Function
Description
Unit
Position
Bit
3000
/SV-ON
Drive Enable
bit
0
-
Reserved -
[1]
and
[2]
/P-CON
Integrator Inhibit
bit
[3]
/A-RST
Fault Reset
bit
[4]
/N-CL
Negative Current Limit
bit
[5]
/P-CL
Positive Current Limit
bit
[6]
/C-SEL
Operation Mode Override
bit
[7]
/C-DIR
Preset Direction
bit
[8]
/C-SP1
Preset Select 1
bit
[9]
/C-SP2
Preset Select 2
bit
[10]
/C-SP3
Preset Select 3
bit
[11]
/C-SP4
Preset Select 4
bit
[12]
/INHIB
Pause Follower
bit
[13]
/G-SEL
Alternate Gain Select
bit
[14]
/PCLR
Position clear
bit
[15]