Rockwell Automation 2071-Axx Kinetix 3 Component Servo Drive Serial Host Command Reference Manual User Manual
Page 73
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
73
Standard Drive Parameters
Appendix A
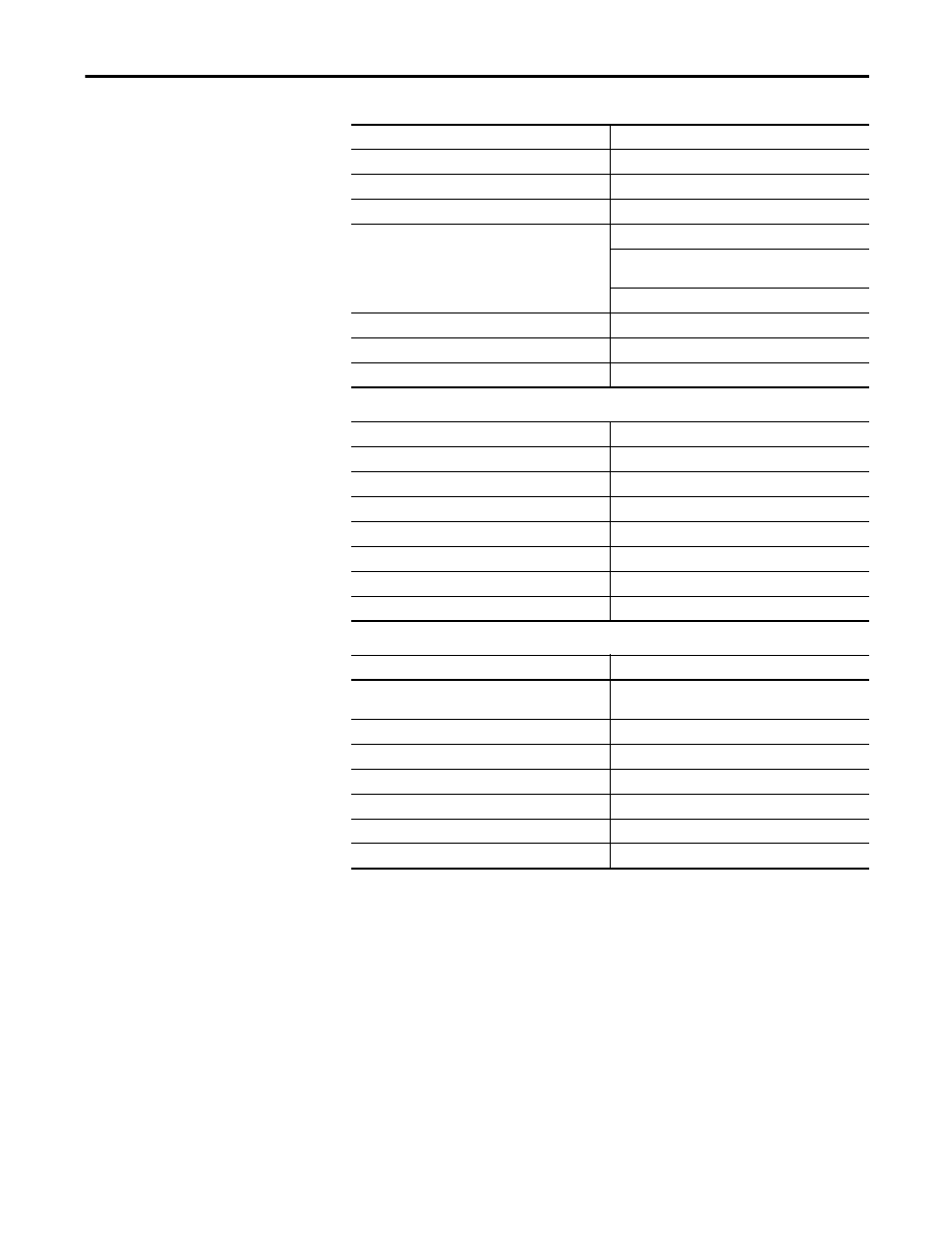
[Pr - 1.18]
Velocity Regulator I Gain Disable Threshold
Ultraware Name
Main Velocity Regulator Gains: I Gain Disable Threshold
Range
0…3000
Default
100
Units
If [Pr - 1.17] = 1, units are % of rated continuous current
If [Pr - 1.17] = 2, units are rotary motors: rpm; linear
motors: mm/s
If [Pr - 1.17] = 3, units are Counts
When Enabled
Follower, Analog Velocity, Preset
Applicable Operating Mode
Immediately
Modbus Address
[Pr - 1.19]
Position Regulator High Error Output Offset
Ultraware Name
Main Position Regulator Gains: High Error Output Offset
Range
0…450
Default
0
Units
Rotary motors: rpm; Linear motors: mm/s
When Enabled
All
Applicable Operating Mode
Immediately
Modbus Address
[Pr - 1.20]
Position Regulator High Error Output Threshold
Ultraware Name
Main Position Regulator Gains: High Error Output
Threshold
Range
0…50,000
Default
1000
Units
Counts
When Enabled
All
Applicable Operating Mode
Immediately
Modbus Address