Rockwell Automation 2071-Axx Kinetix 3 Component Servo Drive Serial Host Command Reference Manual User Manual
Page 119
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
119
Indexing Drive Parameters
Appendix B
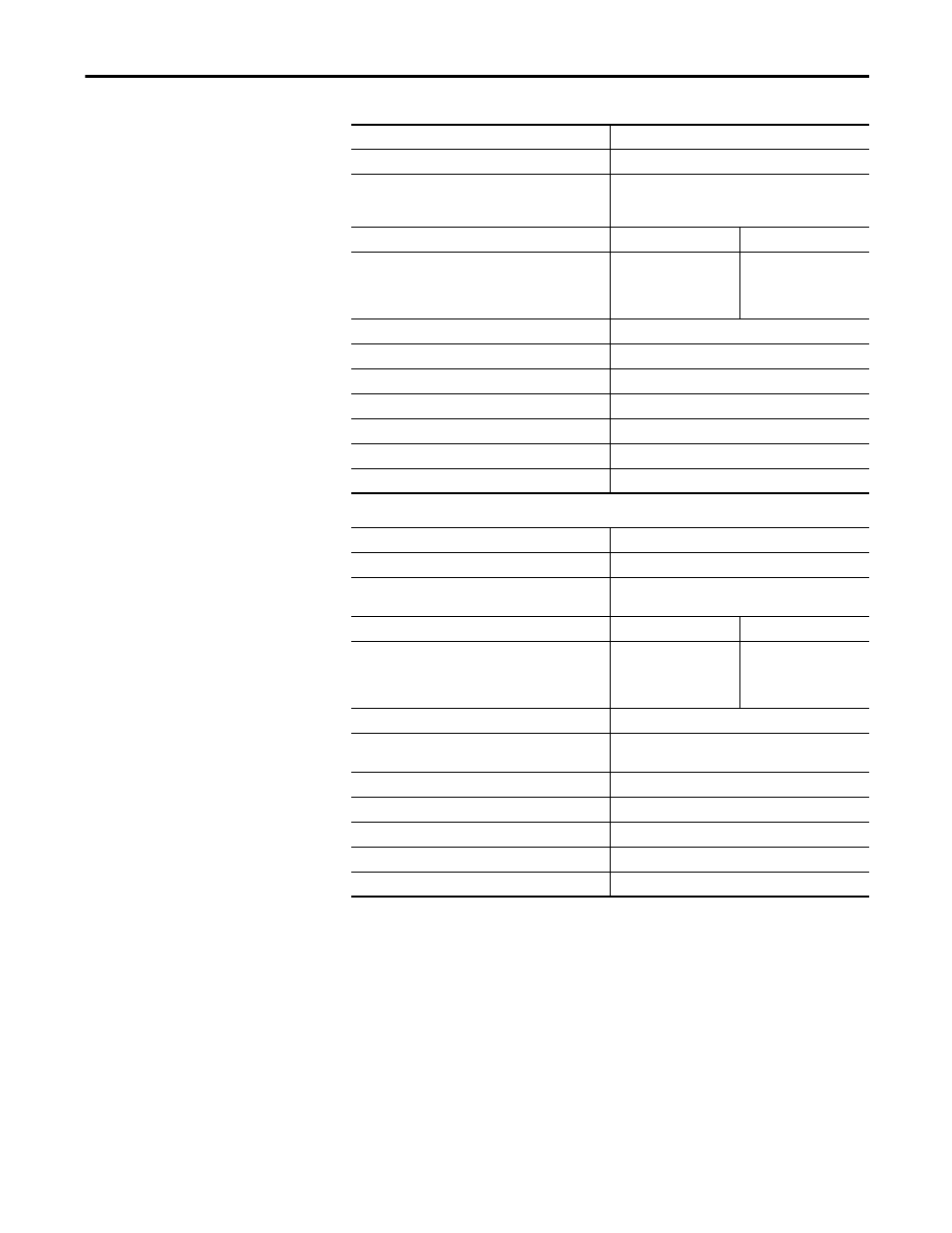
[IN01.03] Creep
Velocity
Ultraware Name
Creep Velocity
Description
For the To Sensor, then Back to Marker Homing Type, the
velocity used for all remaining homing motion after the
motor decelerates to a stop when it finds the sensor edge.
Range Value
Description
0 …6000
The velocity used for all
homing motion after the
motor decelerates to a stop
at the sensor edge.
Default 20
Units
Rotary motors: rpm; Linear motors: mm/s
Access Set
Changeable Status
Disable Drive
When Enabled
Disable Drive
Applicable Operating Mode
Indexing
Modbus Address
5203
[IN01.04] Homing
Acceleration/Deceleration
Ultraware Name
Homing Acceleration/Deceleration
Description
The rate of acceleration and deceleration used during
homing.
Range Value
Description
1 …2,147,483,647
The velocity used for all
homing motion after the
motor decelerates to a stop
at the sensor edge.
Default 6250
Units 10
-2
* rev/s
2
for rotary,
mm/s
2
for linear
Access Set
Changeable Status
Disable Drive
When Enabled
Disable Drive
Applicable Operating Mode
Indexing
Modbus Address
5204 …5205