Monitoring parameter (function code 0x04) – Rockwell Automation 2071-Axx Kinetix 3 Component Servo Drive Serial Host Command Reference Manual User Manual
Page 24
24
Rockwell Automation Publication 2071-RM001B-EN-P - April 2013
Chapter 1
Modbus Protocol
Monitoring Parameter (Function Code 0x04)
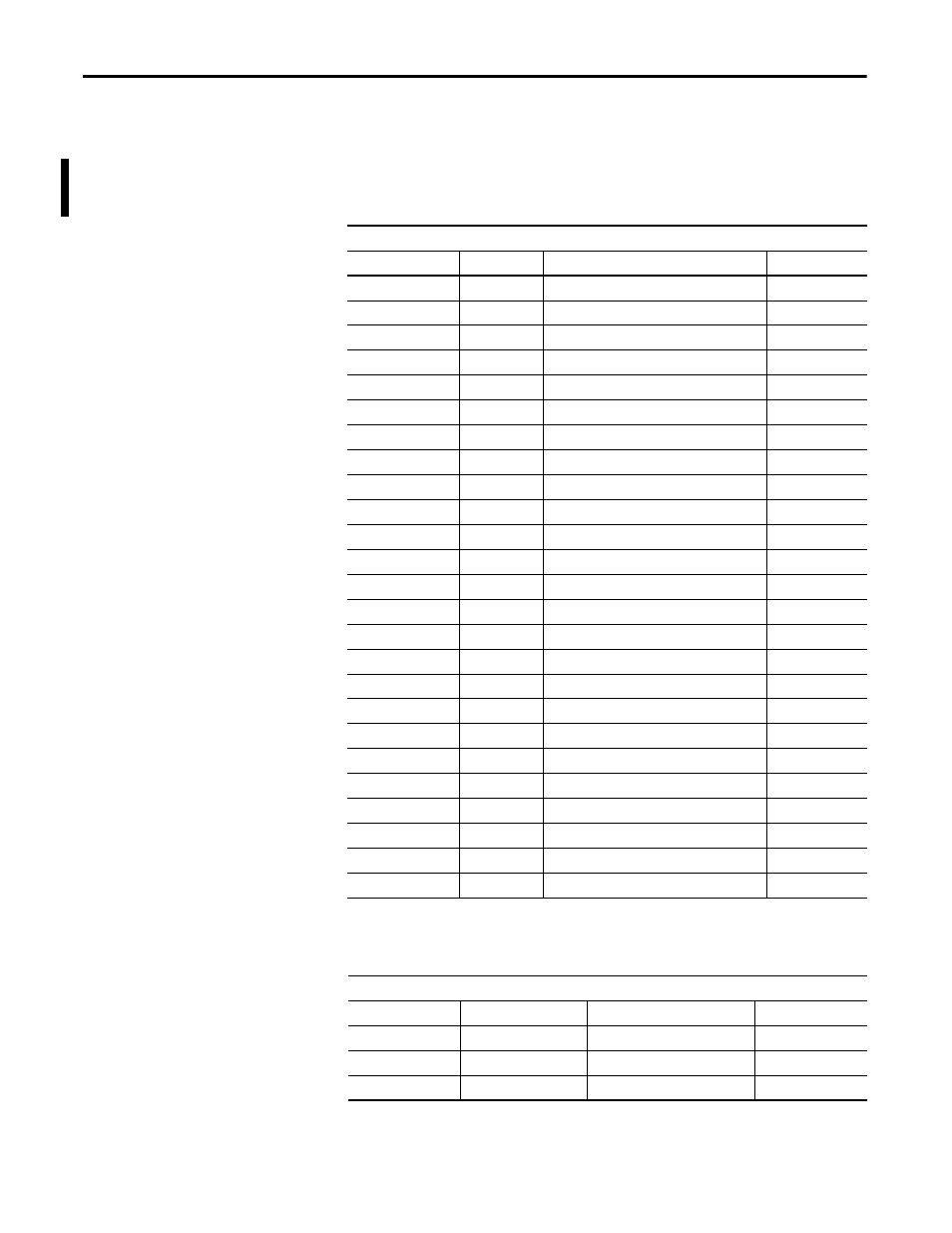
The Read or Multi-read of monitoring variables are possible through function
code 04 Read Input Register. All display parameters of the drive are mapped to
function code 04 range. The default address is 0x00.
Fault and Warning Status Parameter - Input Registers
Display Parameter - Input Registers (Default = 0)
Modbus Address
Drive
Name
Unit
0
dis-00
Velocity Feedback
rpm
1
dis-01
Velocity Command
rpm
2
dis-02
Velocity Error
rpm
3
dis-03
Torque Command
0.10%
4…5
dis-04
Position Feedback
counts
6…7
dis-05
Position Command
counts
8…9
dis-06
Position Error
counts
10
dis-07
Pulse Command Frequency
0.1pps
11
dis-08
Electrical Angle
0.1'
12
dis-09
Mechanical Angle
0.1'
13
dis-10
Regeneration Load Ratio
%
14
dis-11
DC-Link Voltage
V
15
dis-12
Multi-Turn Data
Turn number
16…17
dis-13
Offset in Velocity Command
0.1mV
18…19
dis-14
Torque Offset
0.1mV
20…24
dis-15
Input/Output Signal Status
?-
25…32
dis-16
Display Error History
8Alarm
33
dis-17
Display Software Version
1word
34…35
dis-18
Display Motor info
2word
36
dis-19
Analog Velocity Command Voltage
0.01V
37
dis-20
Analog Current Command Voltage
0.01V
38
dis-21
Drive Rated Output Power
1word
39…40
dis-22
Absolute Single Turn Data
?-
41…42
dis-23
Encoder Feedback Counter
counts
43…99
Reserved
-
-
Fault and Warning Status Parameter - Input Registers (Default = 0)
Modbus Address
Function
Name
Unit
100
Error Check
Servo Error Code
Word
101
Warning Check
Servo Warning Code
Word
102…199
Reserved
-
-