428 appendix – IAI America SSEL User Manual
Page 450
428
Appendix
~
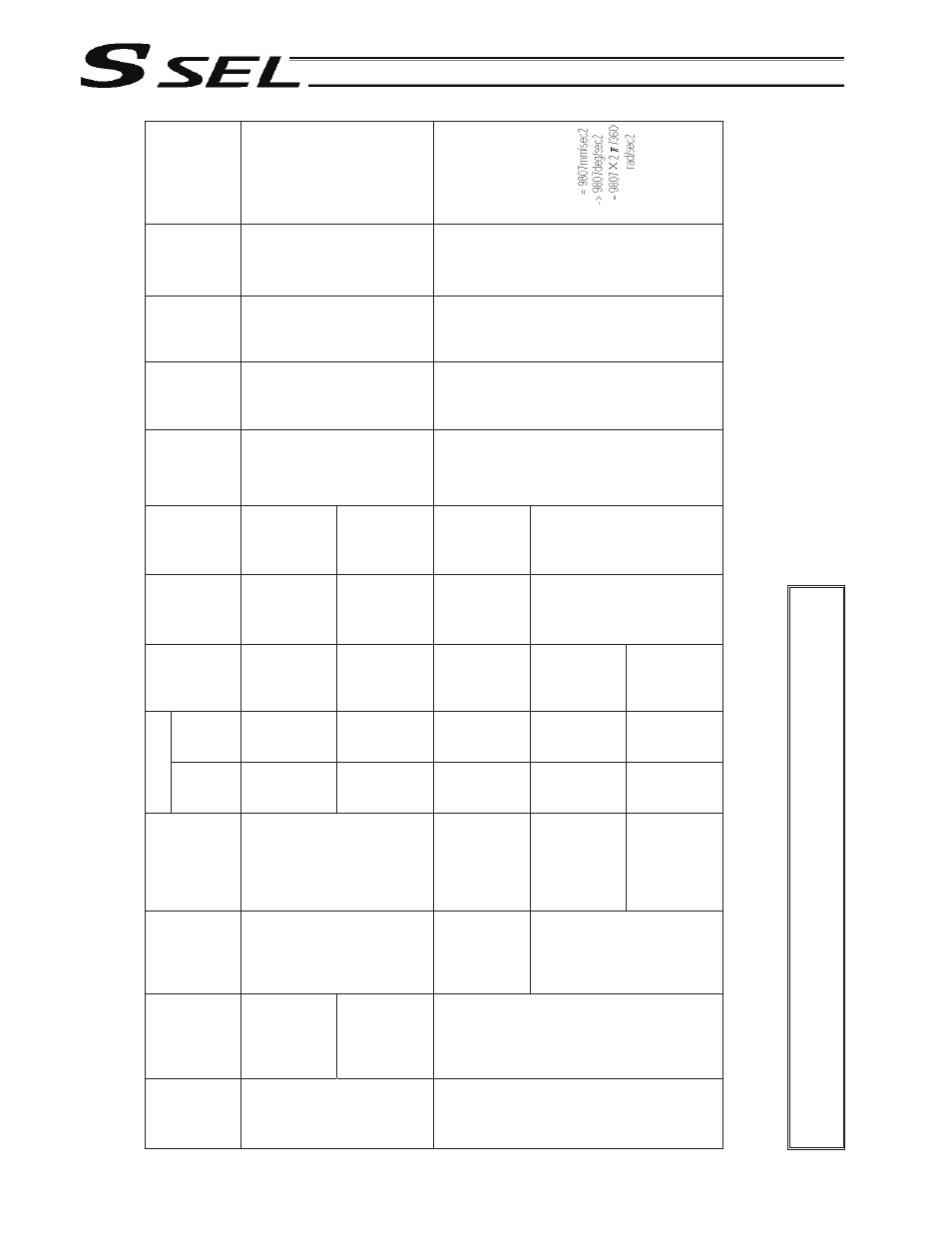
Combination
T
able of SSEL
Linear/Rot
ary Control Parameters
Permitted e
n
cod
e
r
proce
ssing me
thod
Ax
is-speci
fi
c
parameter
No.
1,
Ax
is
operatio
n
ty
pe
Ax
is-speci
fi
c
parameter
No.
68, Mod
e
sele
ctio
n for
linear
mov
ement ax
is
Ax
is-speci
fi
c
parameter
No.
66, Mod
e
sele
ctio
n for
rota
tional
mov
ement ax
is
Ax
is-speci
fi
c
parameter
No. 67
,
Short-
cu
t con
trol
sele
ctio
n for
rota
tional
mov
ement ax
is
ABS INC
Ex
pression
of curre
nt
posi
tion
(approx
.)
Ax
is-speci
fi
c
parameter
No.
7,
Soft
limit +
Ax
is-speci
fi
c
parameter
No.
8,
Soft
limit -
Ax
is-speci
fi
c
parameter
N
o
. 44
,
Length
measuremen
t
corre
ction
Ax
is-
spe
cifi
c
parameter
N
o
. 47
,
Screw
lead
Ax
is-
spe
cifi
c
parameter
N
o
. 50
,
Gear ra
tio
numerator
Ax
is-speci
fi
c
parameter
No. 51
,
Gear
ratio
denominator
Inpu
t uni
t
0
(Normal mode)
{{
Counter
range
Valid Valid
0
(Linear
mov
ement
ax
is)
1
(Infinite
-stro
ke
mode)
* D
u
ty
cy
cle
timeout che
ck
mus
t be
con
sidered
.
Inv
alid Inv
alid
x
{
-10000 ~
9999.999
(Rotary
)
Inv
alid
(Note)
Inv
alid
(Note)
Valid Valid
Valid
Valid
x D
istan
ce
m
m
x Speed
mm/se
c
x Accelera
tion
/
decelera
tion
G
0
(Normal mode)
0
(Do not
sele
ct
shor
t-cut contr
ol)
* Setting
other
than
“0”
is
prohibite
d in
the
normal mode
.
{{
Counter
range
Valid Valid
0
(Do not
sele
ct
shor
t-cut contr
ol)
{{
Counter
range
1
(Rotati
onal
mov
ement
ax
is)
Inv
alid
1
(Index
mode)
1
(Selec
t sho
rt-
cu
t
control)
x
{
0 ~
359.999
(Rotary
)
Inv
alid
(Set
to
359.999
internally
.)
Inv
alid
(Set
to
0
internally
.)
Inv
alid Inv
alid
Valid
Valid
x
Angle mm
-> deg
x Angular
v
e
loci
ty
m
m
/se
c ->
deg/sec
x Angular
accelera
tion
/dece
leration
G
* “deg”
in
dica
te
s
the
angle
of the
rota
ting body
at
the end.
(Notes):
A positioning c
o
mmand other
than “J
W
”
w
h
er
e the coor
dinate range of
approx
. -9990
to +9990 is
e
x
c
eed
ed
w
ill g
e
n
e
rate an “Error
No. CBE,
T
a
rget data
boundar
y
over error.”
Exec
uting a positioni
ng comm
and other than
“J
W
”
w
h
er
e the coordinate range of appr
ox. -9990 to +9
990 is e
x
c
e
e
d
e
d
w
ill res
ult in
an “Error No. C
C
5,
Positioning boundar
y
pul
l-out error.”
Note:
The follo
w
ing settings cannot be selected if t
he actuator is of absolute specification:
x
Set the infinite stroke mode (1)
when a linear mov
ement axis is set.
x
Set 1 (Select) for short-cut control
of rotati
onal a
x
is movement
w
hen
the index mo
de is set