IAI America SSEL User Manual
Page 396
374
Appendix
~ Multi-
s
lider Near-miss Detection (Collision Prevention) Function
* Supported versions: SSEL controller main application version 0.12 or later
: Teaching pendant main application (IA-T-X/IA-T-XD) version 1.42 or later
: Teaching pendant main application (IA-T-XA) version 1.32 or later
: PC software (IA-101-X-**) version V7.0.4.0 or later
When jogging or positioning is performed with a system consisting of multiple sliders, this function
prevents the respective axes from colliding with each other. Near-miss of multiple sliders is detected by
setting the parameters specified below.
Note: This function cannot be used together with the synchro function.
Setting method
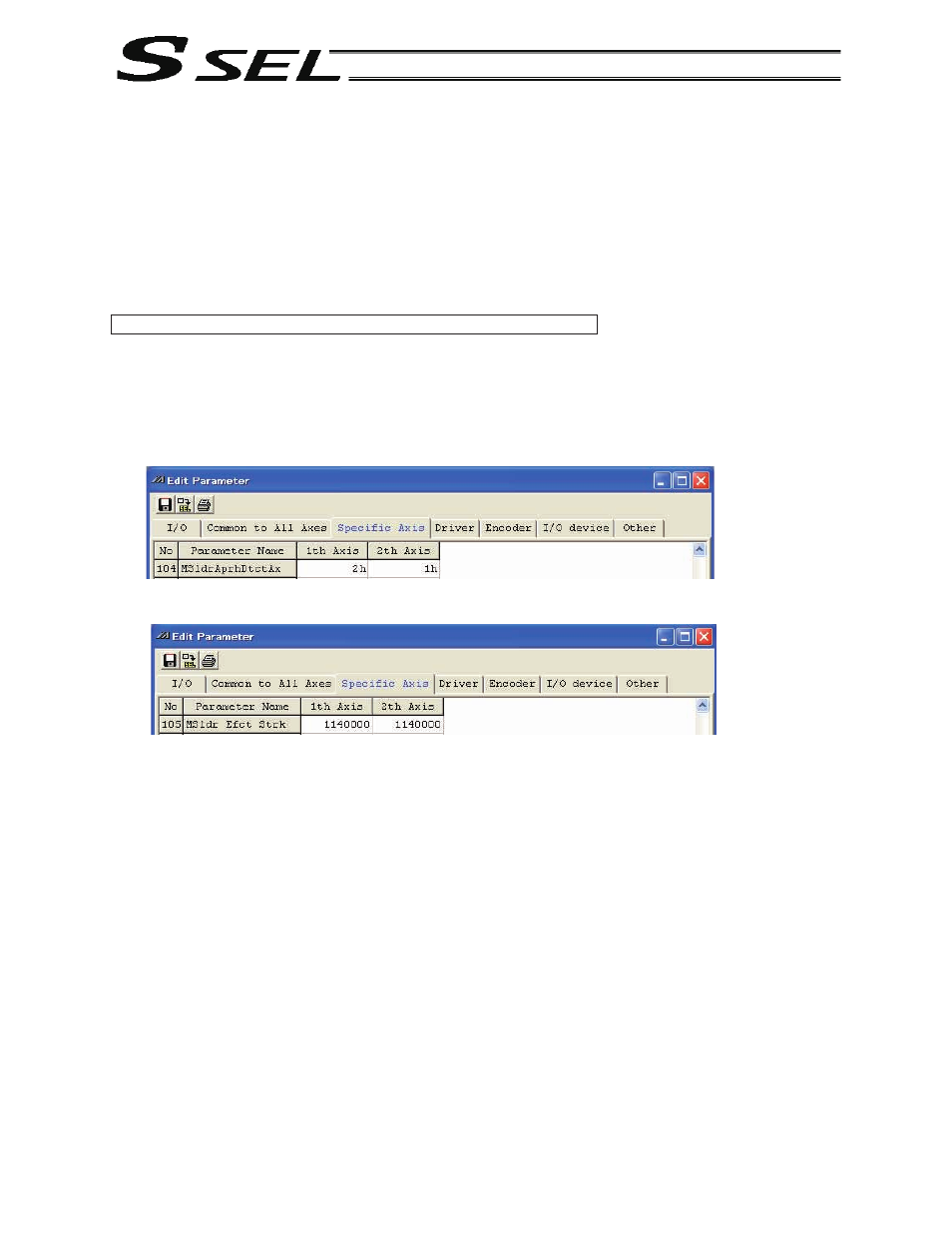
[1] Set the axis number of the paired axis for each axis in axis-specific parameter No. 104, “Multi-slider
near-miss detection target axis. (When a linked slider is present on the positive side of the coordinate
system of the applicable axis.
(Note) In the case of a single slider, set “0h.”
[2] Set axis-specific parameter No. 105, “Effective multi-slider stroke.” (The example below assumes a
stroke of 1140.)
(Note 1)
The multi-slider near-miss (collision prevention) function is effective only when the coordinates
of both target axes (paired axes) have been confirmed. This function is disabled when an
encoder error is present or when either actuator is of incremental encoder specification but has
not yet completed home return.
When a near-miss is detected, either of the following errors will be output:
Error No. 422: Multi-slider command position near-miss error (The actuator will execute an emergency
deceleration to a stop, after which the servo will turn off.)
Error No. 423: Multi-slider actual position near-miss error (The actuator will execute an emergency
deceleration to a stop, after which the servo will turn off.)
If a near-miss has been detected, jog the applicable actuator to pull it out of the near-miss position.
(The actuator can be jogged only in the pull-out direction.)