IAI America SSEL User Manual
Page 335
313
Part 3 Positioner Mode
Cancellation (CANC)
If this signal turns ON while the actuator is moving, the controller will cause the actuator to decelerate to a
stop. The remaining travel distance will be cancelled and the movement will not resume even when the
signal turns OFF thereafter.
Home return (HOME)
The actuator will start home-return operation upon detection of the OFF
o ON edge of this signal.
Once the home return is complete, the HEND signal will be output. This signal can be input as many
times as desired after completion of the initial home return.
(Note) An actuator of incremental specification must always perform home return after the power is
turned on.
Servo ON (SON)
The servo remains on while this signal is ON.
To operate the actuator using the start input/home return input, the servo ON input signal must be ON. If
the servo ON input signal is OFF, these operation commands will not be accepted. (Only the commands
will be ignored, and no error will generate.)
(Note) When this signal turns OFF while the actuator is moving, the actuator will not decelerate to a stop.
It will complete the movement to the target position, after which the servo will turn off.
(Note) To turn on the servo using the servo ON signal, input the *pause signal and *cancellation signal
and turn the signals ON.
Error reset (RES)
This signal is used to reset the alarm output signal (*ALM) that has been generated due to an error.
If an error occurred, check the content of the error and then turn this signal ON.
The error will be reset upon detection of the leading edge of the signal.
(Note) Errors of cold start and higher level cannot be reset using this signal. The power must be
reconnected to reset these errors. For details, refer to Appendix, “Error Level Management.”
Push motion (PUSH)
The actuator will perform push-motion operation if the position signal and start signal are input while this
signal is ON. To perform push-motion operation, turn ON the push-motion input signal before turning the
start input signal ON.
A push-motion operation command is specified using two successive position data points.
If the “start” input signal is turned ON while the “push-motion” input signal is ON for position No. n, the
position data corresponding to position No. n and position No. n+1 will indicate the following items:
The position data for position No. n indicates the target position.
The position data for position No. n+1 indicates the push width.
The acceleration data for position No. n+1, multiplied by 100, indicates the current-limiting value during
push-motion operation.
The speed data for position No. n+1 indicates the push speed.
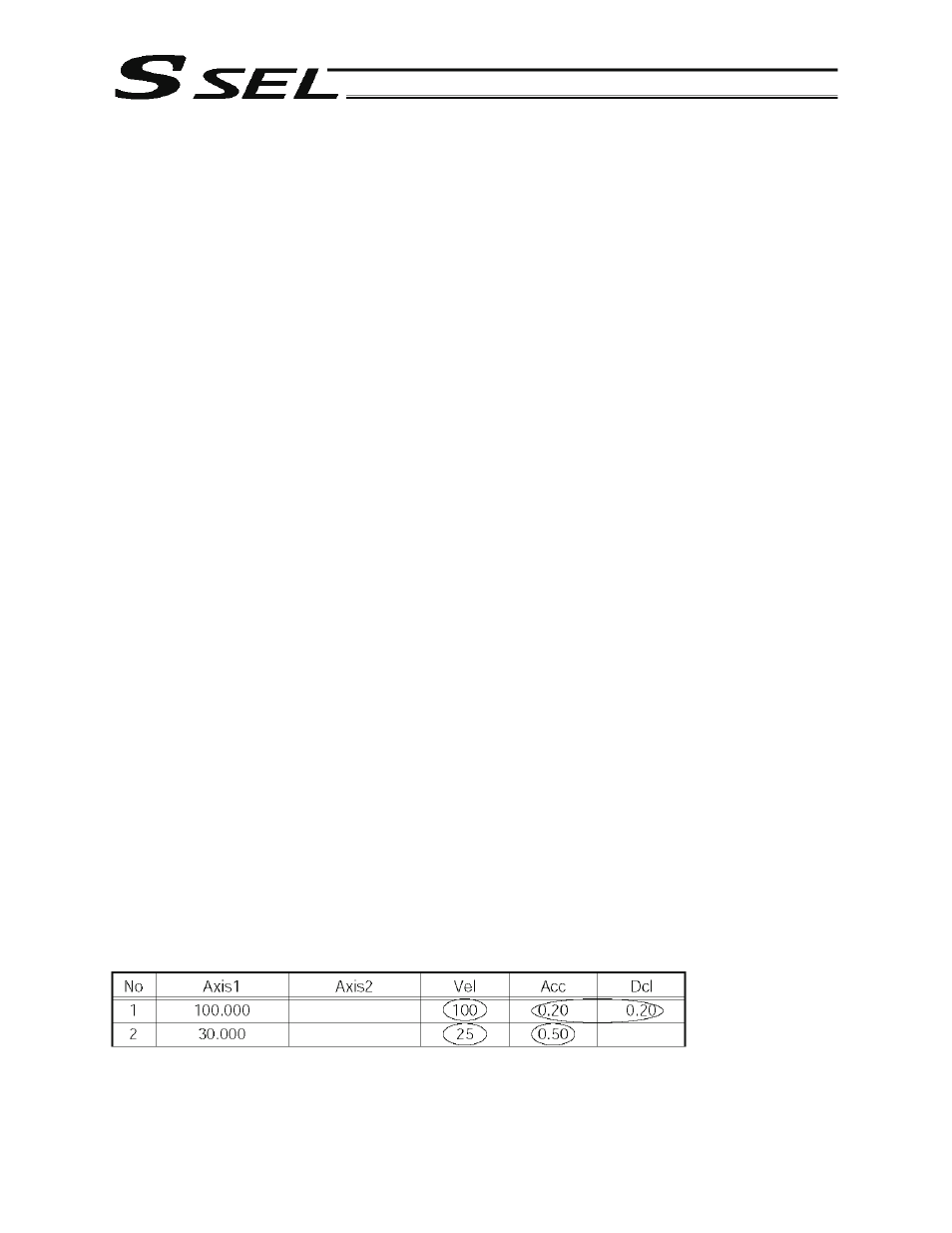
Example: The position data for position No. 1, as specified in the table below, is used for push-motion
operation.
Target position: 100 mm, Push width: 30 mm, Current-limiting value: 50%
Acceleration/deceleration until the push width before the target position: 0.2 G
Push speed: 25 mm/sec