Chapter 9 example of building a system, Equipment, Operation – IAI America SSEL User Manual
Page 298
276
Part 2 Programs
Chapter 9 Example of Building a System
How to build hardware and software is explained in details by using a screw-tightening robot as an
example.
1. Equipment
Screw-tightening machine (for Z-axis)
Actuators (for axes 1 and 2)
IAI’s actuator with 300-mm stroke x 2
Controller
IAI’s SSEL controller
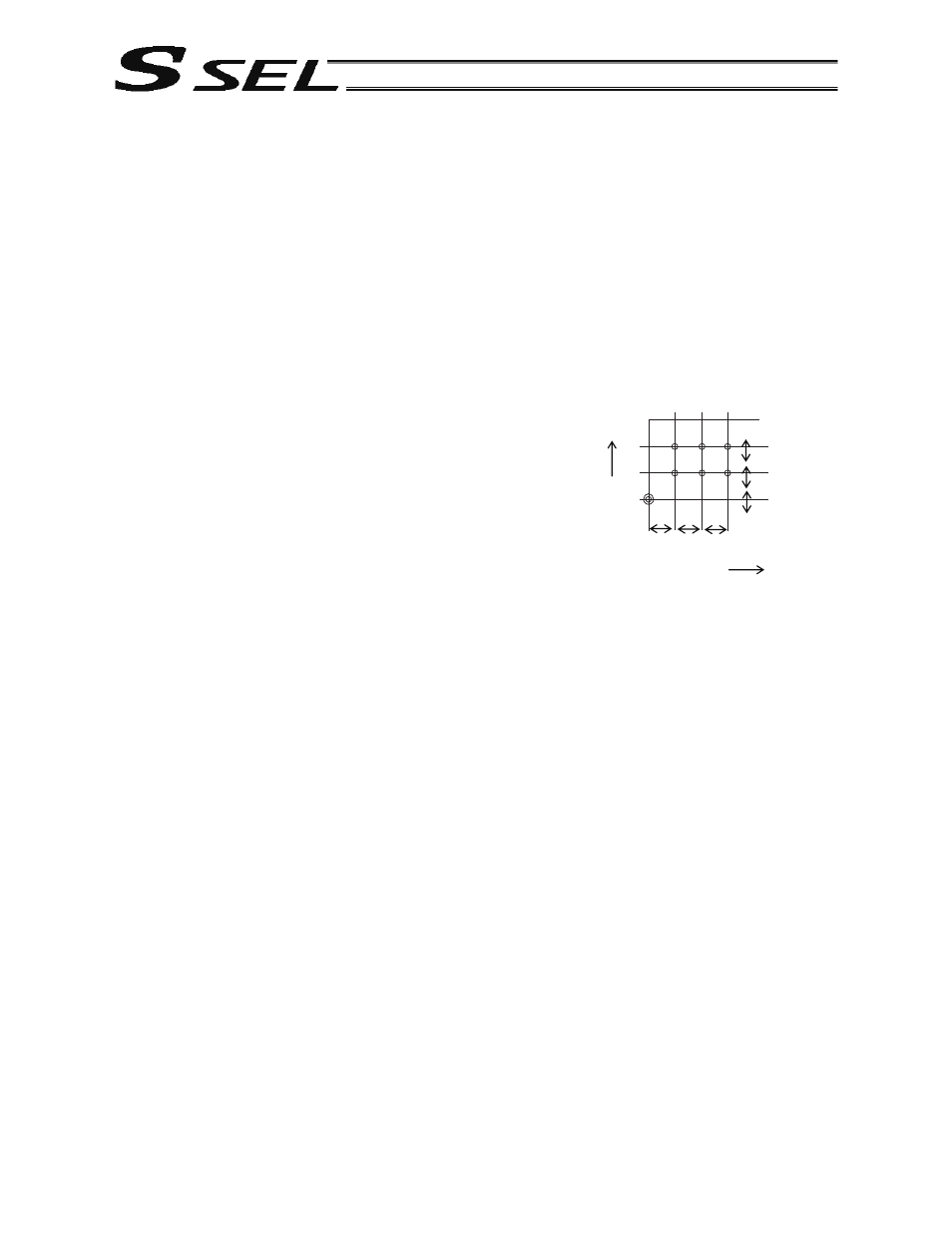
2. Operation
(1) Tighten six screws at 30-mm pitches on axes 1 and 2.
[1] The actuators move to a screw-tightening
position.
[2] The Z-axis air cylinder of the screw-tightening
machine comes down.
[3] The screw-tightening machine starts operating.
[4] When the screw tightening is complete, the Z-
axis air cylinder rises.
[5] The actuators move to the next position.
(2) The parts feeder operates in parallel with the above
operation.
[1] The parts feeder starts when screws are short.
[2] The parts feeder stops when the screws are fully
loaded.
Coordinates
Axis 2
Axis 1
30
30
30
30 30 30
4 5 6
1 2 3
- ERC2 (138 pages)
- ERC2 (188 pages)
- ERC3 (438 pages)
- ERC (153 pages)
- RCA-E (53 pages)
- RCA-P (42 pages)
- RCB-101-MW (38 pages)
- RCP2-C (178 pages)
- RCS-E (102 pages)
- RCA-A4R (72 pages)
- RCA-RA3C (114 pages)
- RCA-SRA4R (56 pages)
- RCA2-RA2AC (100 pages)
- RCA2-SA2AC (92 pages)
- RCA2-TA4C (134 pages)
- RCD-RA1D (40 pages)
- RCP2-BA6 (72 pages)
- RCP2-GRSS (130 pages)
- RCP2-HS8C (126 pages)
- RCP2-RA2C (120 pages)
- RCP2-RTBS (80 pages)
- RCP2W-SA16C (46 pages)
- RCP3-RA2AC (60 pages)
- RCP4-RA5C (82 pages)
- RCP4-SA5C (94 pages)
- RCP4W (96 pages)
- RCS2-F5D (142 pages)
- RCS2-GR8 (46 pages)
- RCS2-RN5N (80 pages)
- RCS2-RT6 (60 pages)
- RCS2-SA4C (258 pages)
- RCS2-TCA5N (62 pages)
- RCL-SA1L (66 pages)
- RCL-RA1L (56 pages)
- RCLE-GR5L (46 pages)
- IK Series (16 pages)
- FS (84 pages)
- IF (76 pages)
- ISB (114 pages)
- ISDA (126 pages)
- ISDB (116 pages)
- ISPWA (90 pages)
- NS (78 pages)
- ICS(P)A (16 pages)
- RS (46 pages)