Multi-tasking – IAI America SSEL User Manual
Page 294
272
Part 2 Programs
2. Multi-Tasking
“Multi-tasking” operation may not be a familiar term, but it is widely used in computer programming to refer
to parallel processing. Simply put, multi-tasking means running several programs in parallel.
Take a screw-tightening robot, for example.
In general, a screw-tightening robot consists of axis-1 and axis-2 actuators and a screw-tightening
machine (up/down air cylinder, etc.).
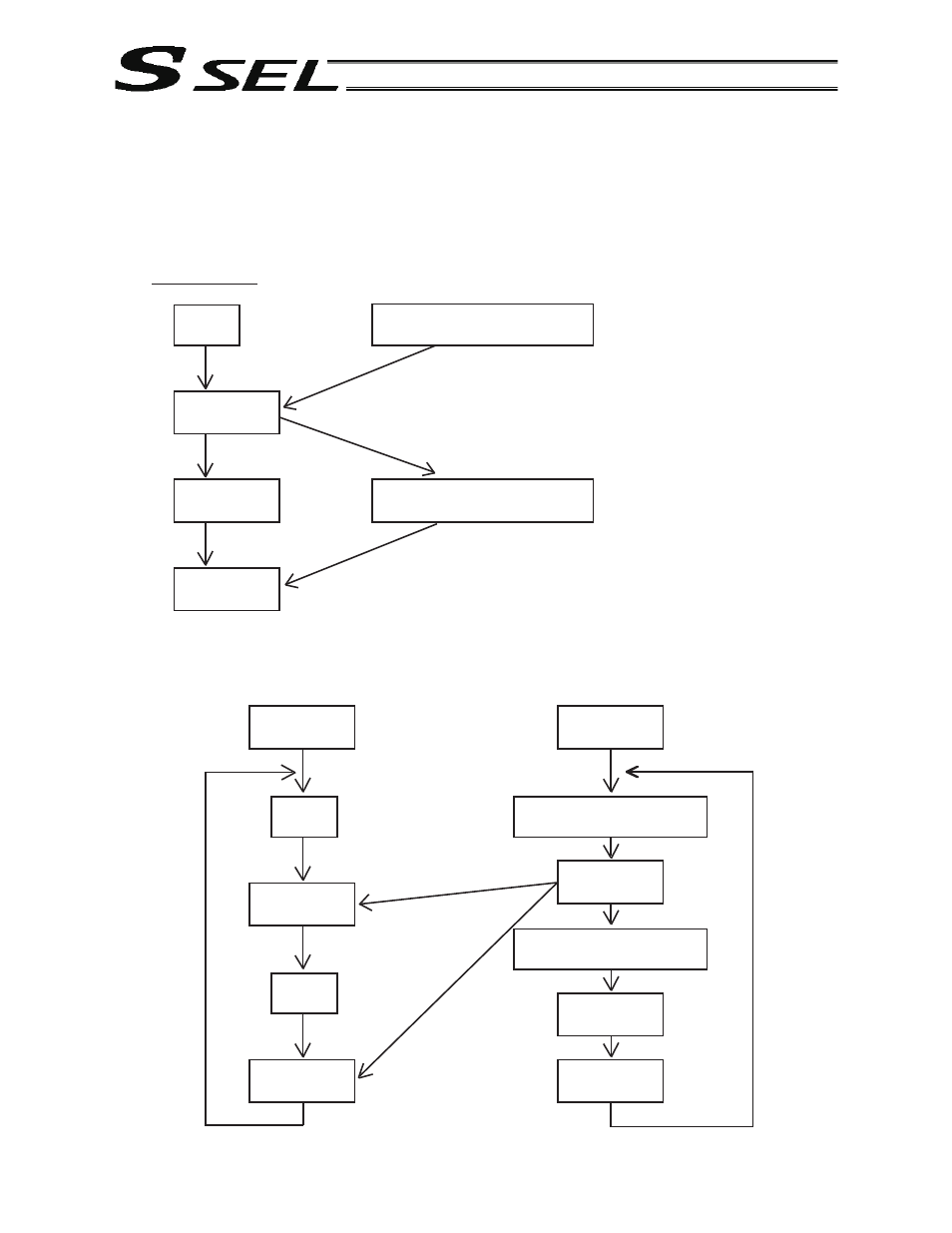
Operation Flow
Although the flow chart is simple, the movement of axis-1 and axis 2 actuators and the operation of the
parts feeder must take place simultaneously. This requires “multi-tasking” operation.
Move
Tighten screw
Move XY
Tighten screw
Parts feeder prepares screws
Parts feeder prepares screws
Start
Program 1
Move
Tighten screw
Move
Tighten screw
Program 2
Start
Parts feeder ON
Screw
preparation OK
Parts feeder OFF
Shortage
of screws
Timer
- ERC2 (138 pages)
- ERC2 (188 pages)
- ERC3 (438 pages)
- ERC (153 pages)
- RCA-E (53 pages)
- RCA-P (42 pages)
- RCB-101-MW (38 pages)
- RCP2-C (178 pages)
- RCS-E (102 pages)
- RCA-A4R (72 pages)
- RCA-RA3C (114 pages)
- RCA-SRA4R (56 pages)
- RCA2-RA2AC (100 pages)
- RCA2-SA2AC (92 pages)
- RCA2-TA4C (134 pages)
- RCD-RA1D (40 pages)
- RCP2-BA6 (72 pages)
- RCP2-GRSS (130 pages)
- RCP2-HS8C (126 pages)
- RCP2-RA2C (120 pages)
- RCP2-RTBS (80 pages)
- RCP2W-SA16C (46 pages)
- RCP3-RA2AC (60 pages)
- RCP4-RA5C (82 pages)
- RCP4-SA5C (94 pages)
- RCP4W (96 pages)
- RCS2-F5D (142 pages)
- RCS2-GR8 (46 pages)
- RCS2-RN5N (80 pages)
- RCS2-RT6 (60 pages)
- RCS2-SA4C (258 pages)
- RCS2-TCA5N (62 pages)
- RCL-SA1L (66 pages)
- RCL-RA1L (56 pages)
- RCLE-GR5L (46 pages)
- IK Series (16 pages)
- FS (84 pages)
- IF (76 pages)
- ISB (114 pages)
- ISDA (126 pages)
- ISDB (116 pages)
- ISPWA (90 pages)
- NS (78 pages)
- ICS(P)A (16 pages)
- RS (46 pages)