97 part 2 programs – IAI America SSEL User Manual
Page 119
97
Part 2 Programs
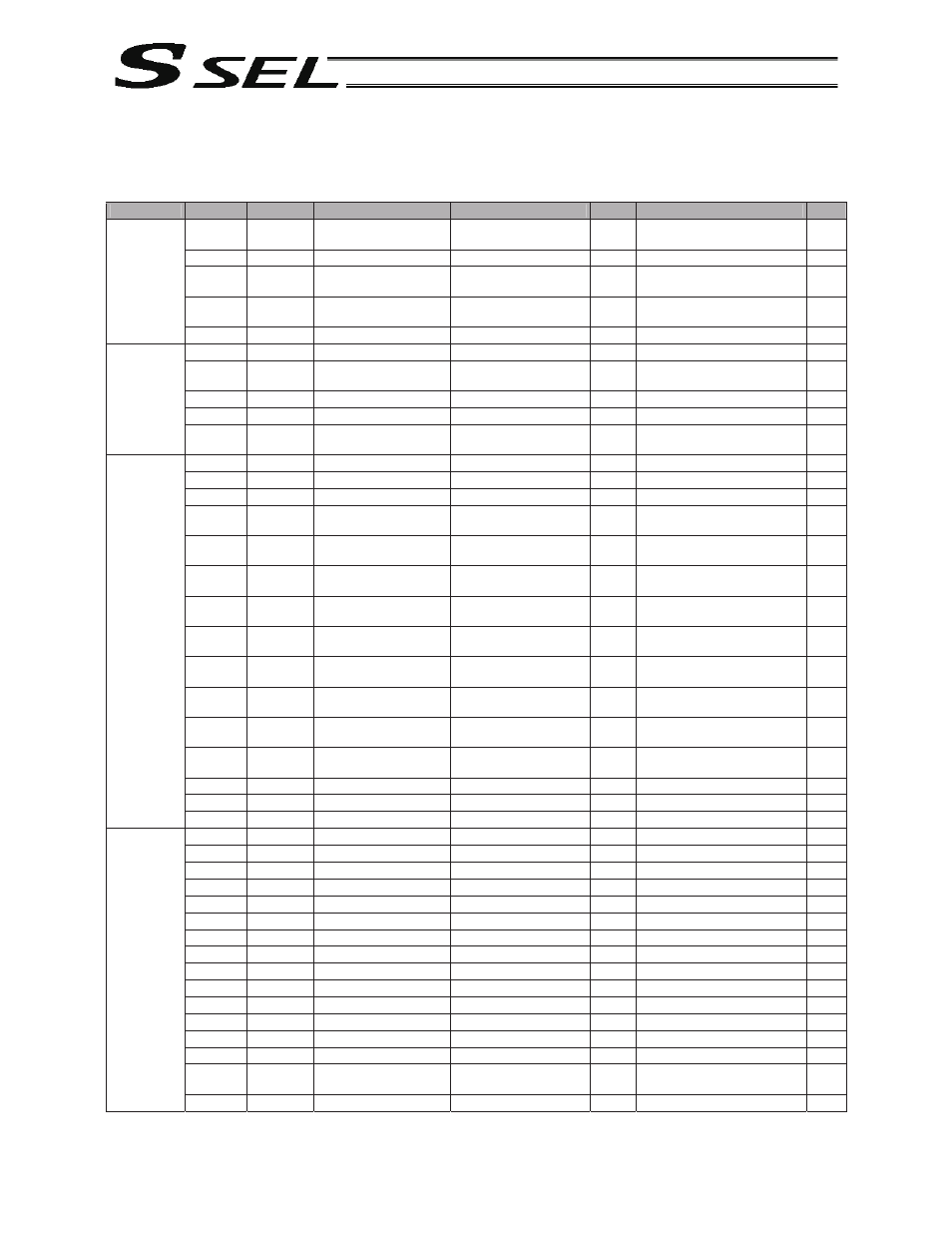
Operation type in the output field
CC: Command was executed successfully, ZR: Operation result is zero,
PE: Operation is complete, CP: Command part has passed, TU: Time up
EQ: Operand 1 = Operand 2, NE: Operand 1
z Operand 2,
GT: Operand 1 > Operand 2, GE: Operand 1
t Operand 2,
LT: Operand 1 < Operand 2, LE: Operand 1
d Operand 2
Category
Condition Command
Operand 1
Operand 2
Output
Function
Page
Optional GOTO
Jump-destination tag
number
Prohibited CP
Jump
133
Prohibited
TAG
Declaration tag number
Prohibited
CP
Declare jump destination
133
Optional EXSR
Execution subroutine
number
Prohibited CP
Execute
subroutine
134
Prohibited BGSR
Declaration subroutine
number
Prohibited CP
Start
subroutine 134
Program
control
Prohibited EDSR Prohibited
Prohibited
CP End
subroutine
135
Optional EXIT Prohibited
Prohibited
CP
End
program
136
Optional EXPG
Execution program
number
(Execution program
number)
CC Start
program
137
Optional
ABPG
Stop program number
(Stop program number)
CC
Stop other program
138
Optional
SSPG
Pause program number
(Pause program number)
CC
Pause program
139
Task
management
Optional RSPG
Resumption program
number
(Resumption program
number)
CC Resume
program
140
Optional
PGET
Axis number
Position number
CC
Assign position to variable 199
141
Optional
PPUT
Axis number
Position number
CP
Assign value of variable 199
142
Optional
PCLR
Start position number
End position number
CP
Clear position data
143
Optional PCPY
Copy-destination
position number
Copy-source position
number
CP
Copy position data
144
Optional PRED Read
axis
pattern
Save-destination position
number
CP
Read current axis position
145
Optional
PRDQ
Axis number
Variable number
CP
Read current axis position (1
axis direct)
146
Optional PTST
Confirmation axis
pattern
Confirmation position
number
CC
Confirm position data
147
Optional PVEL Speed
[mm/sec]
Assignment-destination
position number
CP Assign
position
speed
148
Optional PACC Acceleration
[G]
Assignment-destination
position number
CP Assign
position
acceleration
149
Optional PDCL Deceleration
[G]
Assignment-destination
position number
CP Assign
position
deceleration
150
Optional PAXS
Axis-pattern assignment
variable number
Position number
CP
Read axis pattern
151
Optional PSIZ
Size assignment
variable number
CP
Confirm
position
size
152
Optional
GVEL
Variable number
Position number
CP
Get speed data
153
Optional
GACC
Variable number
Position number
CP
Get acceleration data
154
Position
operation
Optional
GDCL
Variable number
Position number
CP
Get deceleration data
155
Optional
VEL
Speed [mm/sec]
Prohibited
CP
Set speed
156
Optional
OVRD
Speed ratio [%]
Prohibited
CP
Set speed coefficient
157
Optional ACC Acceleration
[G]
Prohibited
CP
Set
acceleration
158
Optional
DCL
Deceleration [G]
Prohibited
CP
Set deceleration
159
Optional
SCRV
Ratio [%]
Prohibited
CP
Set sigmoid motion ratio
160
Optional
OFST
Setting axis pattern
Offset value [mm]
CP
Set offset
161
Optional
DEG
Division angle [deg]
Prohibited
CP
Set division angle
162
Optional
BASE
Reference axis number
Prohibited
CP
Set reference axis
163
Optional
GRP
Valid axis pattern
Prohibited
CP
Set group axes
164
Optional
HOLD
(Input port to pause)
(HOLD type)
CP
Declare port to pause
165
Optional
CANC
(Input port to abort)
(CANC type)
CP
Declare port to abort
166
Optional
VLMX
Prohibited
Prohibited
CP
Specify VLMX speed
167
Optional
DIS
Distance
Prohibited
CP
Set spline division distance
168
Optional
POTP
0 or 1
Prohibited
CP
Set PATH output type
169
Optional PAPR Distance
Speed
CP
Set PUSH command distance,
speed
170
Actuator
control
declaration
Optional
QRTN
0 or 1
Prohibited
CP
Set quick-return mode
171