Chapter 8 real-time multi-tasking, Sel language – IAI America SSEL User Manual
Page 293
271
Part 2 Programs
Chapter 8 Real-Time Multi-Tasking
1. SEL
Language
The SSEL Controller allows integrated control of actuators and peripherals with a single controller using its
32-bit RISC CPU and high-speed real-time operating system. There is no need to learn various languages
for different units, such as robot language for robots and sequencer language for peripherals. Since SEL
language is the only language used, an efficient system can be designed.
The current version of SEL language represents a pioneering evolution of the widely proven programming
language, evidenced by higher-performance features and advanced functions. The latest version is also
easier to use compared with the conventional SEL language.
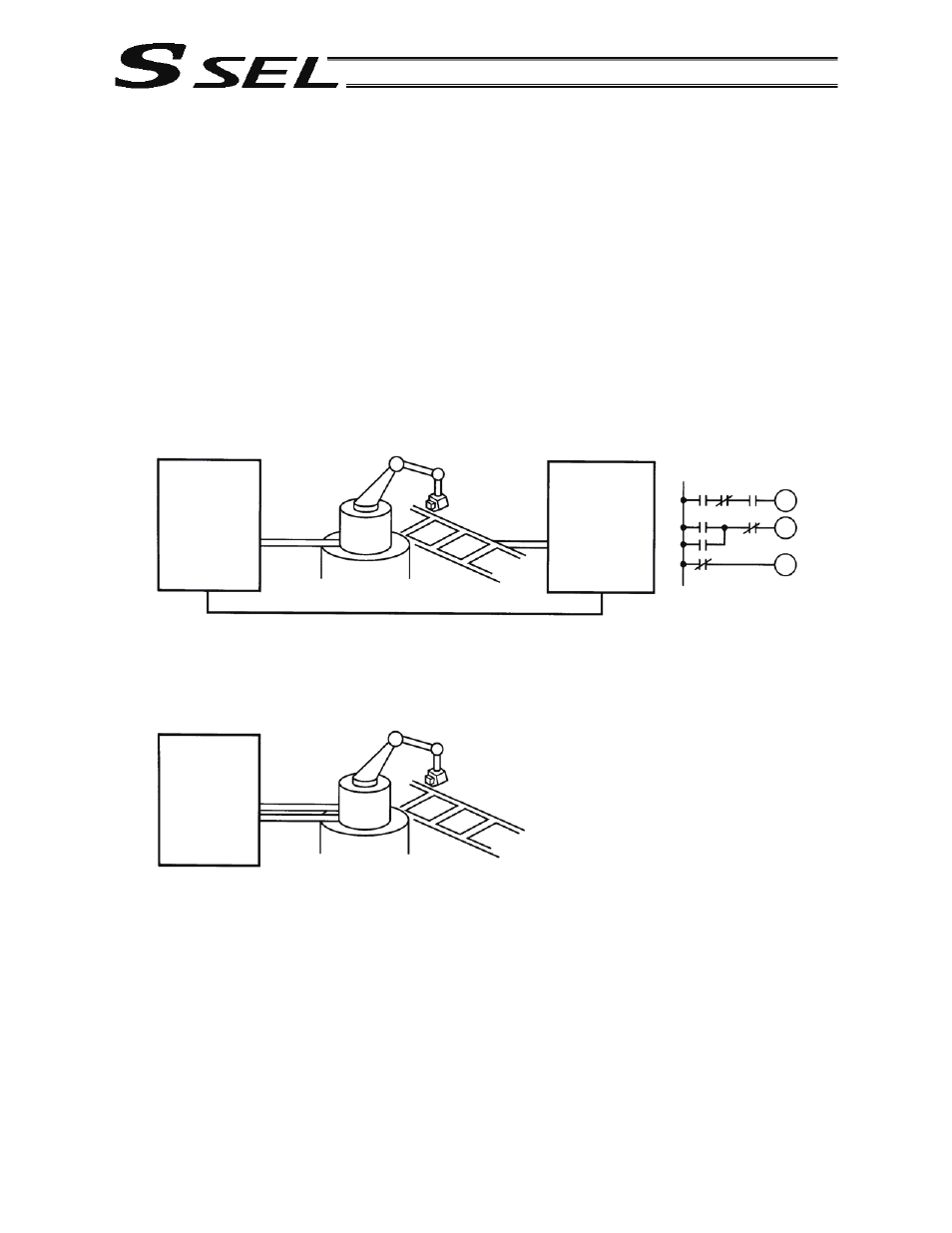
General system
Robot
control unit
Robot language
If
xxxThenxxxElsexxx
MOVP P10
DOUT (307) = IB
Robot
Conveyor
Interlocking wiring
Peripheral
equipment,
control unit,
sequencer
Ladder diagram
SSEL system
SSEL
Controller
Wiring is also simpler.
SEL language
N600 MOVL10 307