HEIDENHAIN TNC 306 Technical Manual User Manual
Page 140
4-40
TNC 406/TNC 306
3 Servo positioning of the NC-axes
3/97
The control calculates a nominal velocity value every 4 ms from the feed programmed in the NC
program and the final position (X-, Y-, Z-, C-axis), allowing for the acceleration which has been
stored (MP1060). The stored acceleration is valid for the rising as well as the falling slope. If two
or more axes are traversed simultaneously, the smallest value for acceleration will be effective.
Every 4 ms a nominal path value is calculated from the velocity nominal value.
s = s
o
+ v ·
∆t
s
= nominal path value
s
o
= previous nominal path value
v
= nominal velocity value
t
= cycle time 4 ms
The nominal path value is resolved into the individual axis components, depending on which axes
have been programmed.
The axis-dependent nominal path value is compared with the actual value of the positions and
the lag s
a
is calculated.
s
ax
= x
Noml
- x
Actl
s
ax
= lag for X-axis
x
Noml
= nominal path value for X-axis
x
Act l
= actual path value for X-axis
The lag is multiplied by the k
v factor
MP1810 and passed on to the drive amplifier as a nominal
velocity value (analog voltage).
v
x
= k
v ·
s
ax
v
x
= nominal velocity-value for X-axis
The k
v
factor (position loop gain) determines the control loop response of the machine, and it must
be matched to the machine.
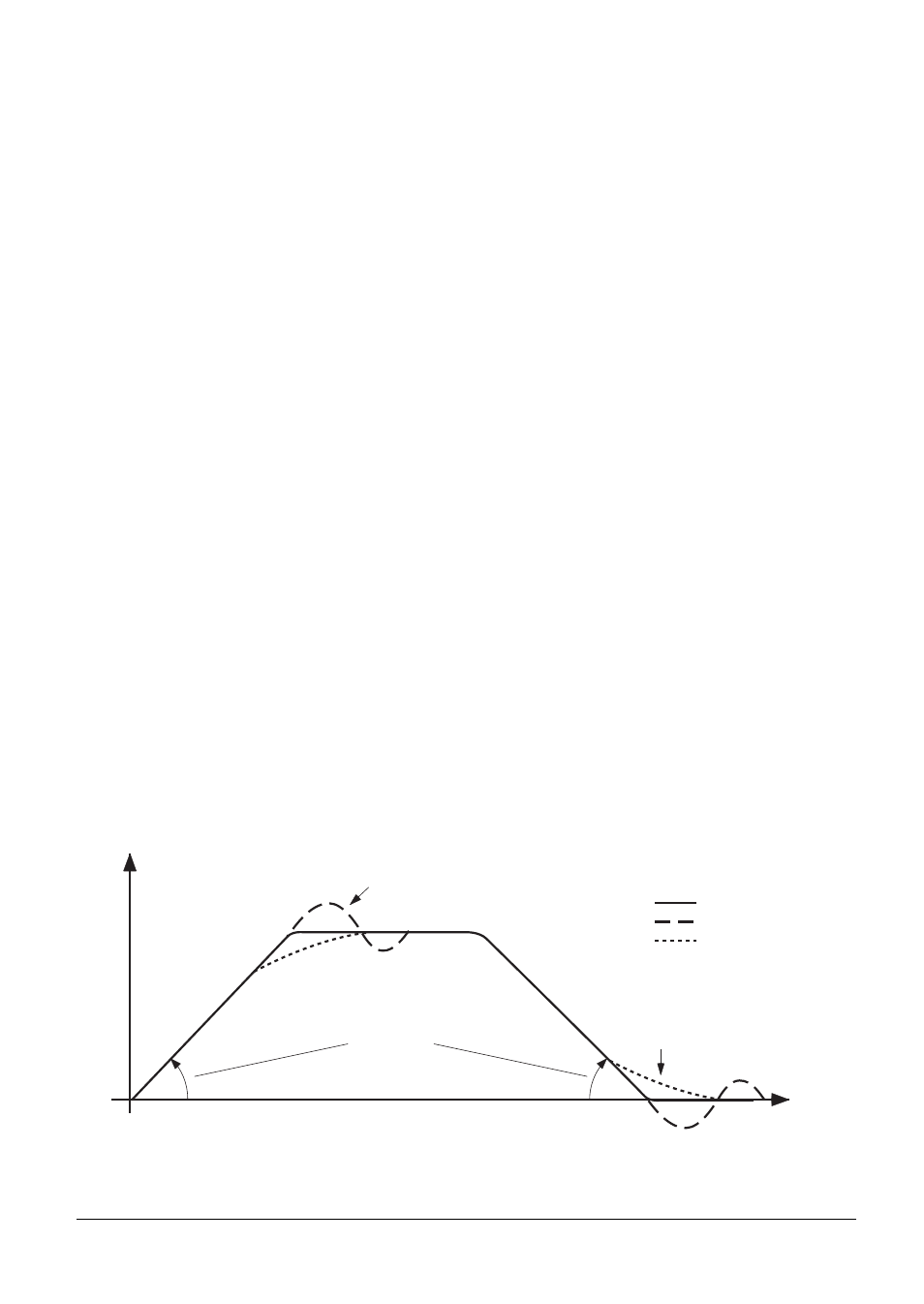
If a very high k
v
factor is chosen, the lag is very small; however, this can lead to an overshoot when
approaching a new position. On the other hand, if the k
v
factor is too small then the new position will
be reached too slowly.
The optimal k
v
factor must be determined by trial and error (see the section "Commissioning and
start-up procedure").
The following diagram shows the response for various k
v
factors:
U [V]
t [s]
MP1060
MP1810
MP1810
kv correct
kv too large
kv too small
The acceleration can be programmed with machine parameter MP1060. The acceleration
determines the slope of the ramp on the rising and falling edges.