Rockwell Automation 2092-DAx Ultra1500 User Manual User Manual
Page 132
Publication 2092-UM001D-EN-P — July 2005
6-6
Maintaining and Troubleshooting Your Ultra1500
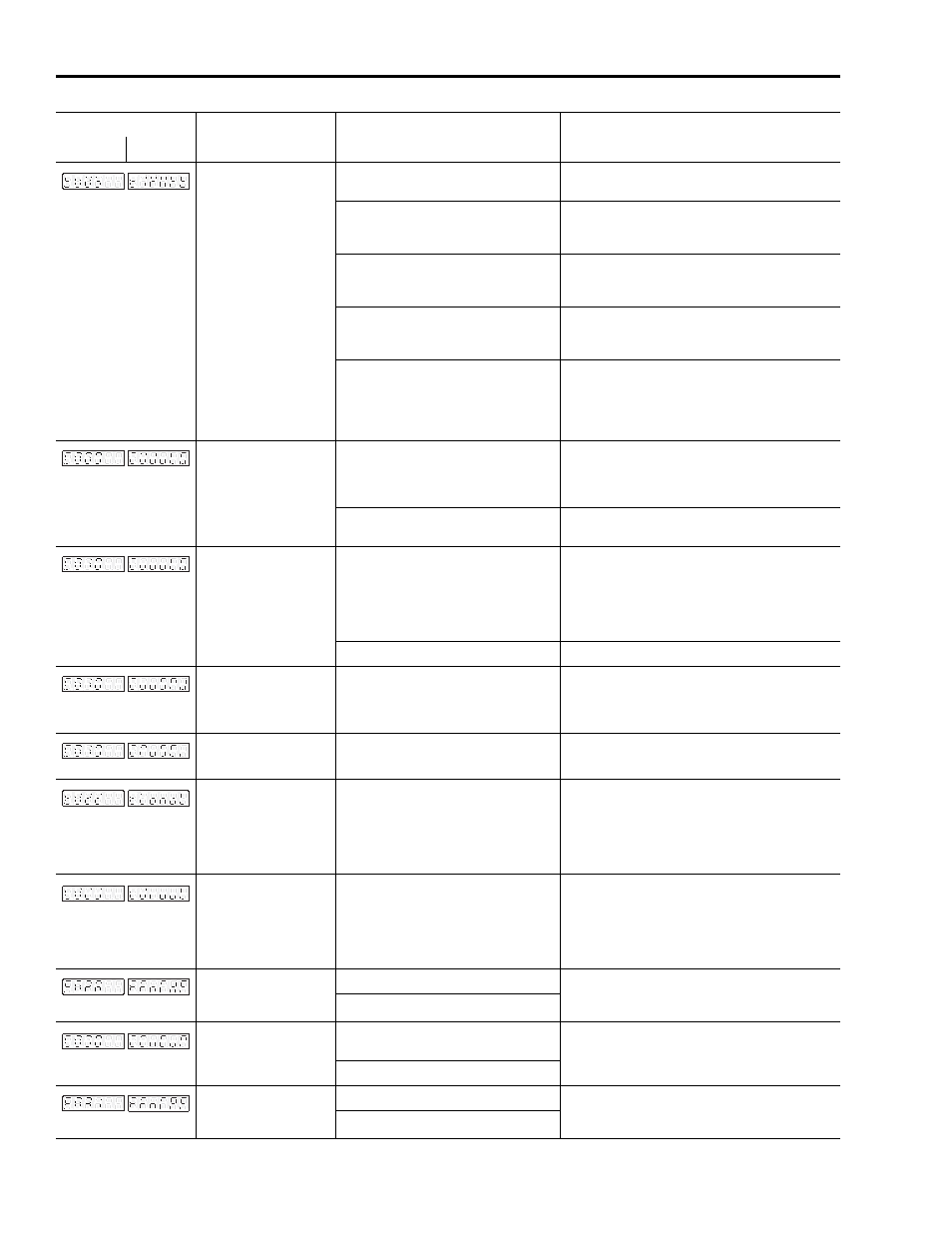
E005
IPM Error
Motor cables shorted
Verify continuity of motor power cable and
connector.
Motor winding shorted internally
Disconnect motor power cables from the motor. If
the motor is difficult to turn by hand, it may need to
be replaced.
Drive temperature too high
• Check for clogged vents or defective fan.
• Ensure cooling is not restricted by insufficient
space around the drive.
Operation above continuous power rating
• Verify ambient temperature is not too high.
• Operate within the continuous power rating.
• Reduce acceleration rates.
Drive has a bad IPM output, short circuit,
or overcurrent
Remove all power and motors connections, then
perform a continuity check from the DC bus to the U,
V, and W motor terminals. If continuity exists, check
for wire fibers between terminals, or send drive in for
repair.
E009
Bus Undervoltage
Low AC line/AC power input
• Verify voltage level of the incoming AC power.
• Check AC power sources for glitches or line drop.
• Install uninterruptible power supply (UPS) on the
AC input.
Attempted to enable drive without main
power active.
Apply main power before enabling drive.
E010
Bus Overvoltage
Excessive regeneration of power (i.e.,
When the motor is driven by an external
mechanical force, it may regenerate too
much peak energy through the drive’s
power supply and the drive faults to save
itself from an overload.)
• Verify shunt circuit.
• Adjust motion profile to stay within the range of
the regenerative resistor.
• Replace regenerative transistor.
• Replace drive.
Excessive AC input voltage
Verify input is within specification.
E018
Motor Overspeed
Motor speed exceeds maximum
• Confirm encoder wiring.
• Retune drive system.
• Verify input gain of external speed or torque
command.
E019
Excess Position Error
Position error exceeds permitted value
• Increase following error limit.
• Check position loop tuning.
E022
Motor Continuous
Current Overload
The internal filter protecting the motor
from overheating has tripped
• Reduce acceleration rates.
• Reduce duty cycle (ON/OFF) of commanded
motion.
• Increase time permitted for motion.
• Use larger drive and motor.
• Checking tuning.
E023
Drive Overload
The motion application requires average
drive current in excess of rated capability
• Reduce acceleration rates.
• Reduce duty cycle (ON/OFF) of commanded
motion.
• Increase time permitted for motion.
• Use larger drive and motor.
• Check tuning.
E028
Encoder Data Range
Error
Encoder not programmed correctly
Replace motor.
Encoder memory corrupted
E030
Encoder Cable Open
Communication not established with an
intelligent encoder.
• Verify motor selection.
• Verify the motor supports automatic identification.
• Verify encoder wiring.
Hall error
E031
Encoder Data Parameter
Error
Encoder not programmed correctly
Replace motor.
Encoder memory corrupted
Error Display
Description
Possible Cause(s)
Action/Solution
Code
Text