D gain, D gain -33 – Rockwell Automation 2092-DAx Ultra1500 User Manual User Manual
Page 113
Publication 2092-UM001D-EN-P — July 2005
Ultra1500 Application Examples
5-33
.
D Gain
The D Gain parameter generates a control signal proportional to the derivative
of the velocity error. It can be in the range 0–10,000. This gain provides
damping to the velocity loop response that can reduce oscillations. The D
Gain can also improve the speed of the response for large changes in the
command signal.
Figure 5.14 shows the affect of varying the D Gain. The P Gain and Integral
Time were deliberately set to cause an oscillatory response. Upon application
of the step input, the error derivative is large and positive for the first update
and then it is negative and decreasing for the remainder of the response. The
result of the positive error derivative for the first update is that the regulator
provides a large compensation that result in a faster response. This large
positive compensation only occurs for a single update. This can be seen in the
figure below, where the response reaches the command level more quickly as
the D Gain setting is increased. After the first update, the error derivative is
negative because the error is decreasing. The D Gain control signal works as
an anticipatory kind of control. It subtracts from the overall regulator
compensation so that the overshoot is reduced.
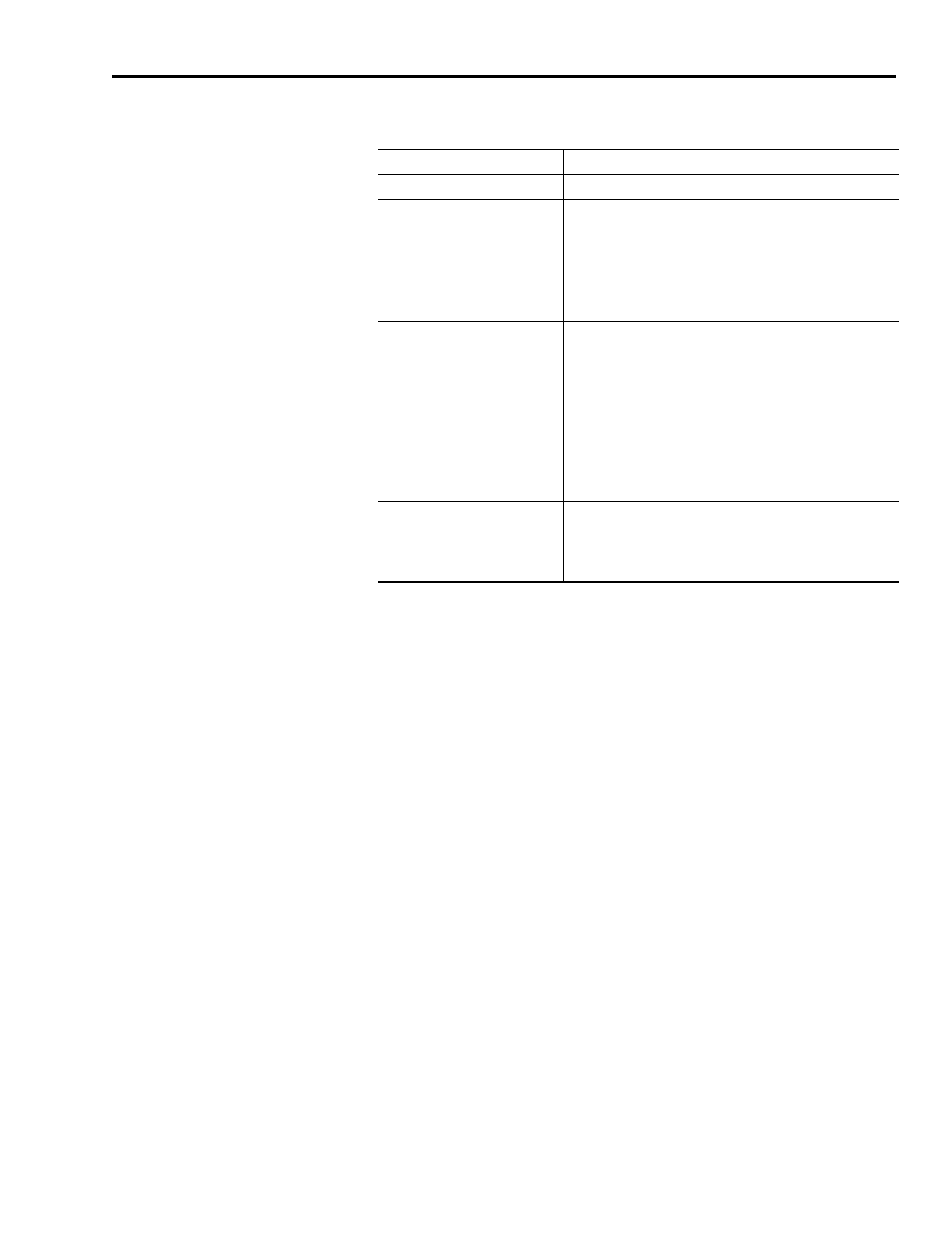
Integrator Mode Setting
Description
Always On
The velocity regulator integral term is always used.
High Current Disable
This parameter value is specified as a percentage of the motor
continuous current rating. The velocity regulator integral term is
updated normally when the current command is less than the
Integrator Threshold setting. When the current command
exceeds this parameter setting, the integral term is held at a
constant value until the current command is less than this
parameter setting. This setting can reduce integrator windup
caused by acceleration or deceleration.
Velocity Command Disable
The velocity regulator integral term is updated normally when
the velocity command is less than the Integrator Threshold
setting. When the velocity command exceeds this parameter
setting, the integral term is held at a constant value until the
velocity command is less than this parameter setting. This may
be useful when the steady state error is only a concern below
some threshold velocity. The drive enforces two addition
constraints to this Integrator Mode. Both the feedback and
command velocity must exceed a minimum value in order for the
integral term to be held. The minimum value is 2 radians/second
(mechanical) for rotary motors and 2 radians/second (electrical)
for linear motors.
Position Error Disable
The velocity regulator integral term is updated normally when
the position error is less than the Integrator Threshold setting.
When the position error exceeds this parameter setting, the
integral term is held at a constant value until the position error
is less than this parameter setting.