Kp -35 kff -35 – Rockwell Automation 2092-DAx Ultra1500 User Manual User Manual
Page 115
Publication 2092-UM001D-EN-P — July 2005
Ultra1500 Application Examples
5-35
Kp
The Kp parameter sets the proportional response of the position regulator. It
can be in the range 0–700. The regulator uses this gain to generate a velocity
command proportional to the position error. Larger gains result in larger
velocity commands, faster response, and increased stiffness in the system for a
given position error. Kp settings that are too large will cause instability, and Kp
settings that are too small results in loose or sloppy system dynamics.
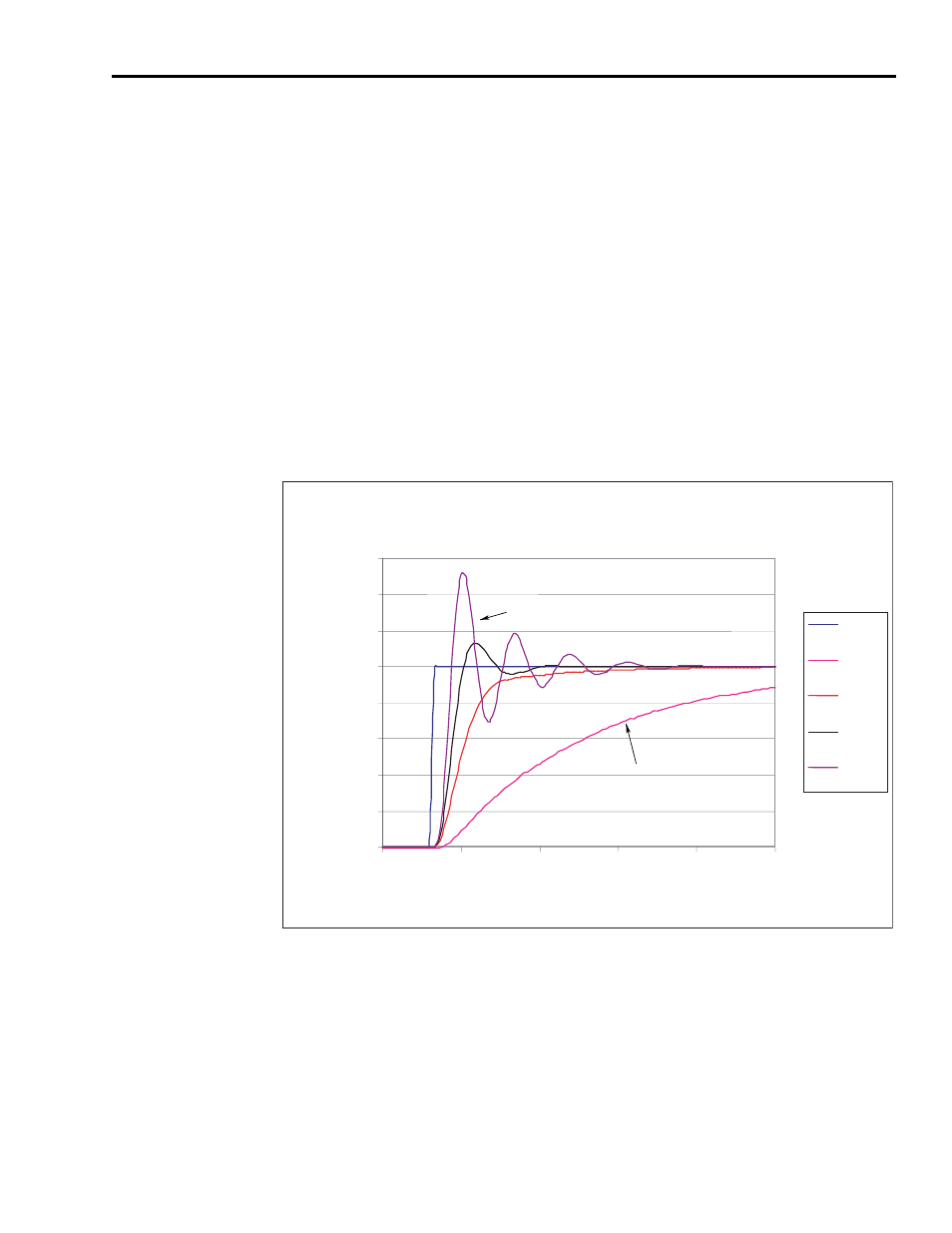
Figure 5.15 shows the effect of varying the Kp setting on the position step
response with the feedforward gain (Kff) set to zero. The response takes more
time to approach the command value for smaller values of Kp and responds
more quickly with increasing Kp values. Excessive Kp gain value can result in
reduced stability and an oscillatory response.
Figure 5.15
Position Regulator Step Response with Varied Kp
Kff
The Kff parameter controls the amount of velocity command feedforward
applied in the position regulator. Larger gains result in reduced following error,
but too much gain causes position response overshoot.
In Figure 5.16 and 5.17, Kp = 20, (the default value), and Kff is varied from 0
to 100%. Figure 5.16 illustrates the effect of the Kff gain on the step response.
The step change in position command results in a large velocity command. As
Position
Command
Kp = 5
Kp = 20
Kp = 40
Kp = 5
Kp = 80
Time (msec)
0
2000
4000
6000
8000
16000
14000
12000
10000
Follower Position (counts)
0
20
40
60
100
80
Kp = 80