West Control Solutions KS98-1 User Manual
Page 45
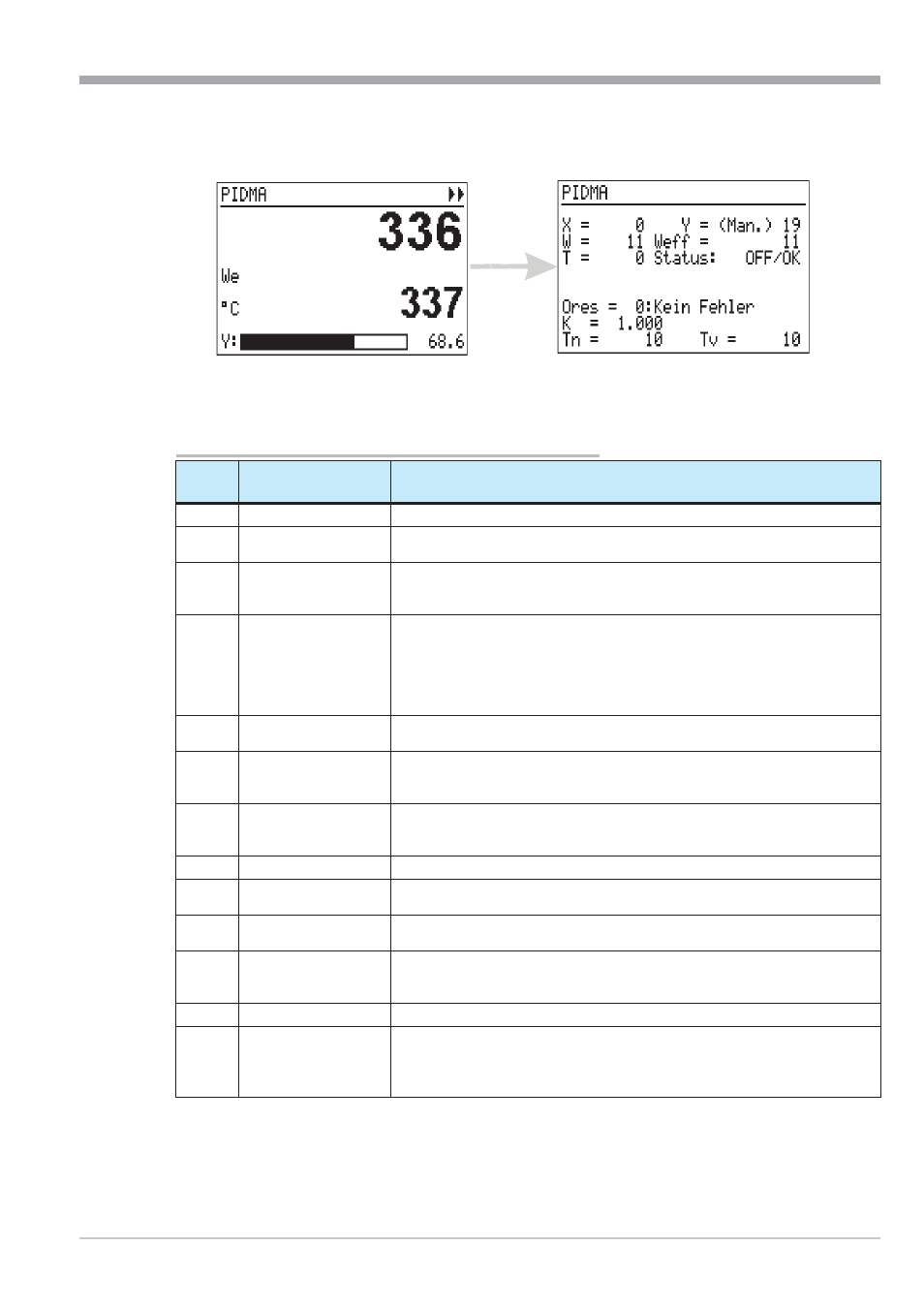
The controller type PIDMA offers the following self-tuning page.
For self-tuning preparation, parameters must be adjusted dependent on process and engineering. For this purpose, spe -
cial knowledge of the applicable function block is required, i.e. it should be done by the programming engineer. Self-tu -
ning start is as described above.
Signification of self-tuning messages
ORes for PIDMA
ORes
Signification or
error cause
Possible solution
0
No attempt was made
1
Xlimit too small
Step change threshold too small: compared to the process noise, the step change thresh-
old is too small. Start a new attempt with a higher positioning pulse.
2
dYopt large
Positioning pulse too high: the correcting variable would exceed the positioning limits
when the selected pulse height is output. Start a new attempt with smaller positioning
pulse or reduce the correcting variable in manual mode previously.
3
Start again
No rest. The autotuner has detected that the process is probably not at rest. Please wait,
until reaching the rest condition. Another possibility is to activate the drift compensation
or to increase the positioning pulse. Note: With pulse width modulated (PWM) control
outputs (2 and 3-point controller), oscillations of process value PV are susceptible to occur
even during manual mode, if the corresponding cycle time t1 (t2) is too long. In this case,
the controller cycle times should be as low as possible.
4
dYopt small
Positioning pulse too small: the step response is hidden by process noise. Start a new at-
tempt with a higher positioning pulse, or take measures to reduce the noise (e.g. filter).
5
No peak
Max. detection failed: after output of the positioning pulse, no maximum / minimum in
the process value curve was detected. The settings for the process type ( with / without
compensation) should be checked.
6
Output sat
Positioning limits during self-tuning were exceeded. During the attempt, correcting vari-
able MV has exceeded the positioning limits. Repeat the attempt using a smaller posi-
tioning pulse or a reduced correcting variable during manual mode.
7
Controller type
No self-tuning result for the specified combination P/I/D can be found.
8
Monotony
Process not monotonous: the process has a strong all-pass behaviour ( temporarily, the
process value runs in opposite direction ) or serious trouble during the attempt.
9
Extrapolation
Extrapolation failed: after the positioning pulse end, no process value decrease was de-
tected because of excessive noise. Increase the positioning pulse or attenuate the noise.
10
Bad result
Result useless: excessive noise, or the determined process parameters do not correspond
to the description of a process with dead band. Start a new attempt with a higher posi-
tioning pulse or attenuate the noise.
11
Man. break
The self-tuning attempt was canceled manually by the operator with „STOP“ .
12
Direction
Faulty output action: the expected output action of the step response is opposed to the
correcting variable.
Cause can be faulty setting of the output action, or e.g. inverting actuators. Change the
controller output action.
9499-040-82711
Operating pages
Controller
I-45
Fig. 31 Optimization page