Control parameters 253 – West Control Solutions KS98-1 User Manual
Page 253
value before self-tuning can be detected by means of drift monitoring and taken into account when self-tuning is done
for the next time.
CSpeed can be used to determine if, during subsequent operation, the controller should reach the setpoint quickly,
with a slight overshoot, or slowly with gentle approach to the setpoint. Using CSpeed , the parameter can be swit-
ched over also after self-tuning, provided that the controller parameters were not changed manually.
After self-tuning start, timer Tdrift for process value drift detection and timer Tnoise for noise detection (variations
independent of the correcting variable) are started. Dependent on process, the timers should be long enough to permit
detection of an interference-independent drift and multiple “ups” and “downs” of interference effects.
After elapse of these timers, the actual correcting variable is increased by dYopt . When the process value has increa-
sed by more than Xlimit under consideration of drift and noise, the correcting variable is reset to the initial value. Ho -
wever, self-tuning is completed only, when the process value has decreased to nearly half of the initial value after
exceeding the maximum. During decrease after the correcting variable pulse, the estimated remaining time until
self-tuning end is displayed continuously. After completion of self-tuning, the determined parameters K, Ti and Td are
displayed on the self-tuning page, taken over into the function block together with parameters VD, BW_p and CW_d
and activated for the running process.
Control parameters of PIDMA:
Unlike CONTR, PIDMA does not have separate parameters for heating and cooling. Parameter K which is valid for both
ranges determines the control gain of a parallel controller structure.
Further parameters permit independent weighting of individual controller components:
VD: In addition to the control gain, the derivative gain (Td/T1) permits an increase or reduction of the derivative action.
BW_p: Setpoint weighting factor of proportional action
CW_d: Setpoint weighting factor of derivative action.
Parameters BW_p and CW_d can reduce the effect of a setpoint change on the controller reaction. I.e. different con -
troller behaviour after setpoint changes (control behaviour) or process value changes (disturbance behaviour) can be
selected. A factor within 0 and 1 can be applied to the setpoint effect.
9499-040-82711
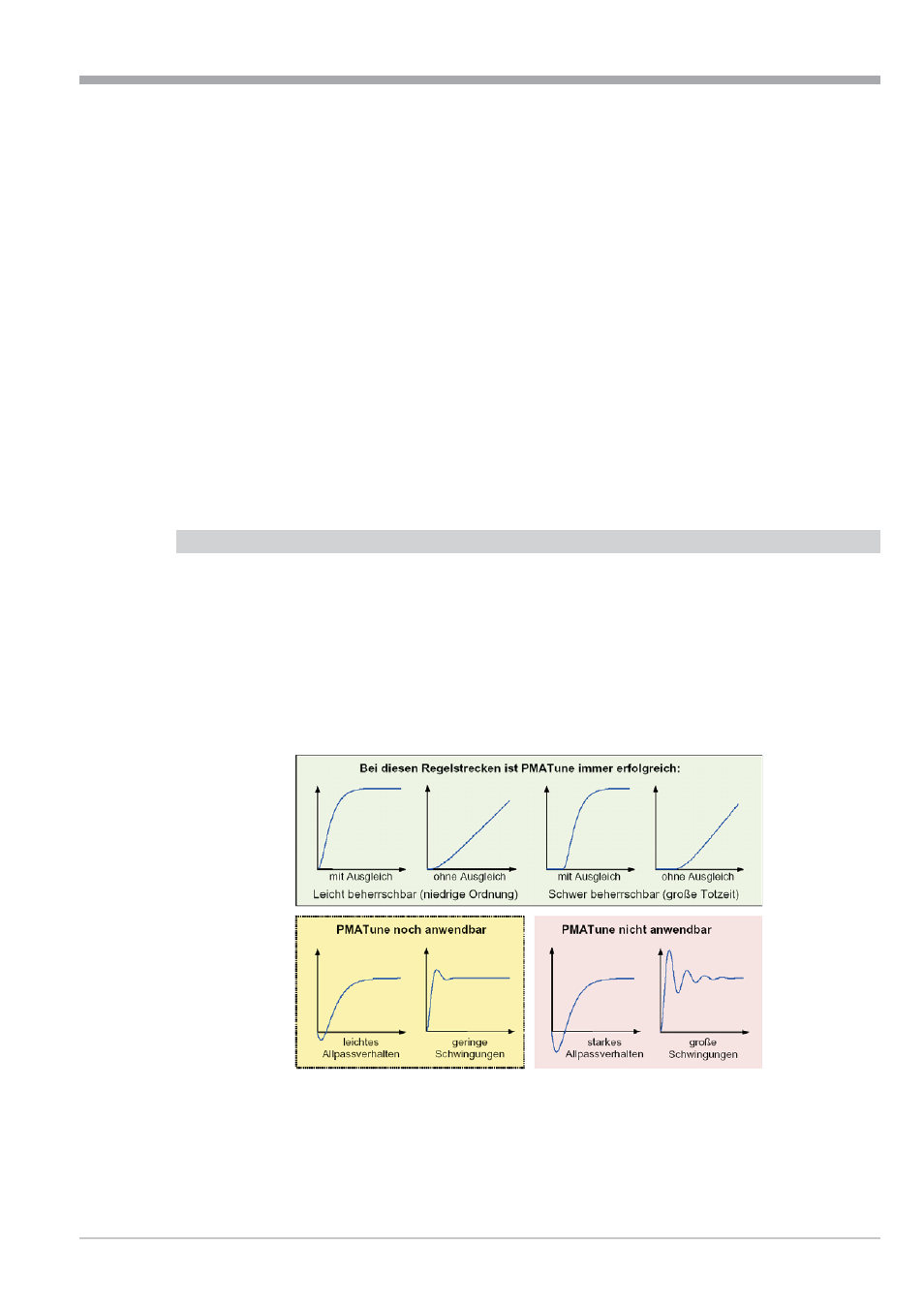
Controller characteristics and self-tuning with PIDMA
III-253
Fig. 68