Three-point stepping controller 236, Xtpuls xp tm, Ч ч 2 01 – West Control Solutions KS98-1 User Manual
Page 236: Xxp tpuls tm, Y1â y2â
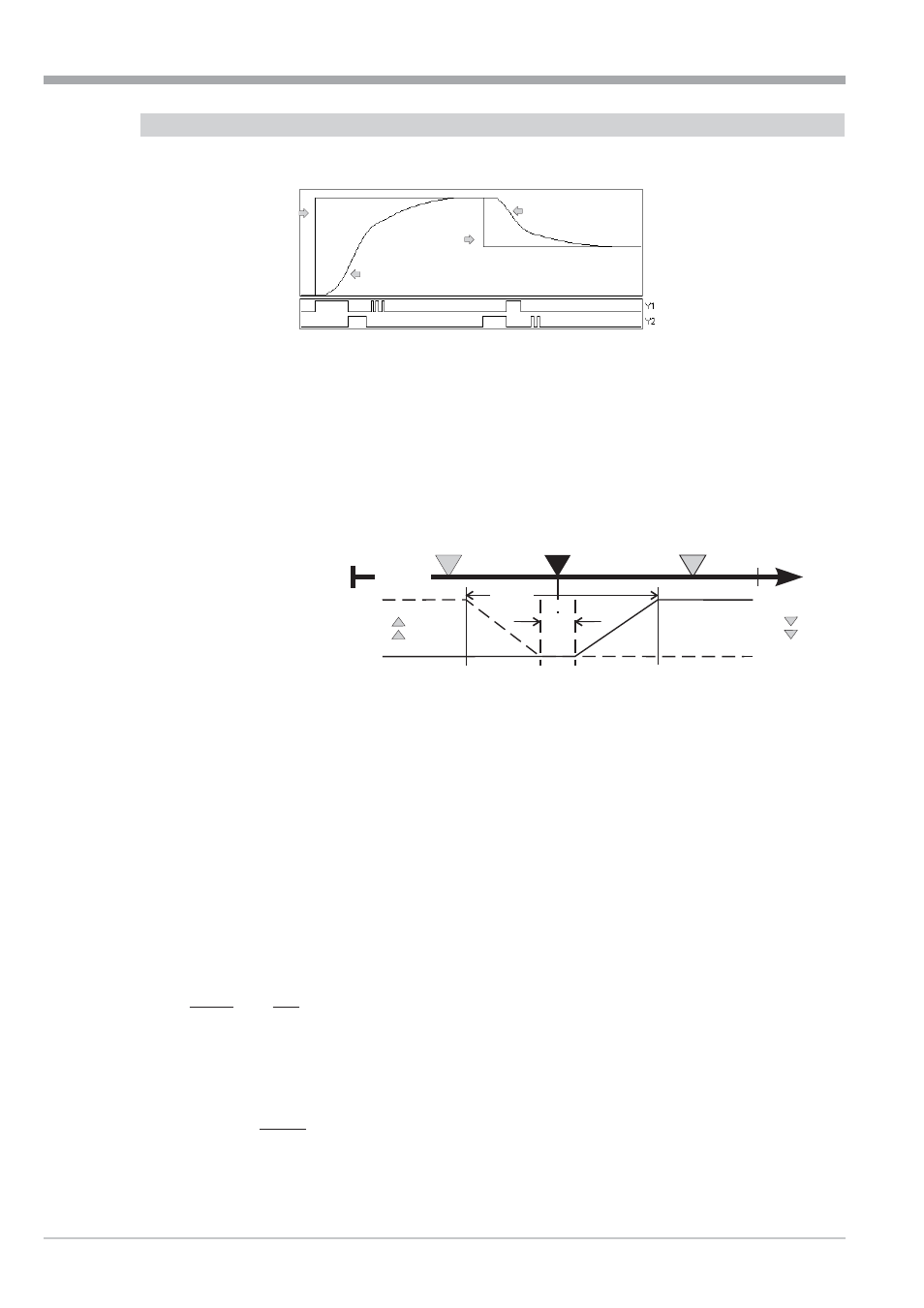
Three-point stepping controller
Switching controller for control of a valve (e.g. temperature control by means of motorized valve and gas-air mixture)
1. Open valve;
r outputs Y1 = 1, Y2 = 0
2. Don’t move valve; r outputs Y1 = 0, Y2 = 0
3. Close valve;
r outputs Y1 = 0, Y2 = 1
To validate the adjusted X
p1
for the actuator response time, response time T
m
must be adjusted. The smallest positio-
ning step is 100ms.
+
With PMA controllers the position feedback has no influence on the PID-behaviour!
Adjusting the neutral zone
Neutral zone X
sh
can be increased in case of excessive output switching. However, note that an increase the neutral
zone will reduce the control sensitivity.
For this reason, we recommend optimizing switching frequency (actuator wear) and control sensitivity.
Three-point stepping controllers can be operated with or without position feedback Yp .
Schritt
3-point stepping controller
SchrittYP
3-point stepping controller with position feedback
whereby
Yp is not used for control. The static characteristic of a three-point stepping controller is shown in the figure
above.
The hysteresis shown in this diagram is practically unimportant, but can be calculated from the adjustable min. pulse
length T
puls
? 100ms.
X
Tpuls
Xp
Tm
sh
=
Ч Ч
2
01
,
g
With
Tpuls switched off, the shortest positioning step Tpuls is dependent of Tm, Xsh and Xp.
By varying
Xsh , a required min. pulse length Tpuls can be realized:
X
Xp
Tpuls
Tm
sh
=
Ч Ч
-
12 5
0 75
,
'
,
Controller
9499-040-82711
III-236
Control behaviour
Output Y1 (open)
Output Y2 (close)
Process value
Process value
Setpoint
Setpoint
100%
0%
100%
0%
Y1Â
Y2Â
Xn100
Xn0
W0
Weff
W100
Xeff
Xp1
Xsh
Fig.: 58
Static operating principle
of a three-point stepping
controller