Iii-16.5 optimizing the controller 240, Optimizing the controller 240, Characteristic values 240 – West Control Solutions KS98-1 User Manual
Page 240: Process characteristics 240, Process characteristics 240,263, Iii-16.5 optimizing the controller, Process characteristics, Characteristic values of the controllers
III-16.5
Optimizing the controller
Process characteristics
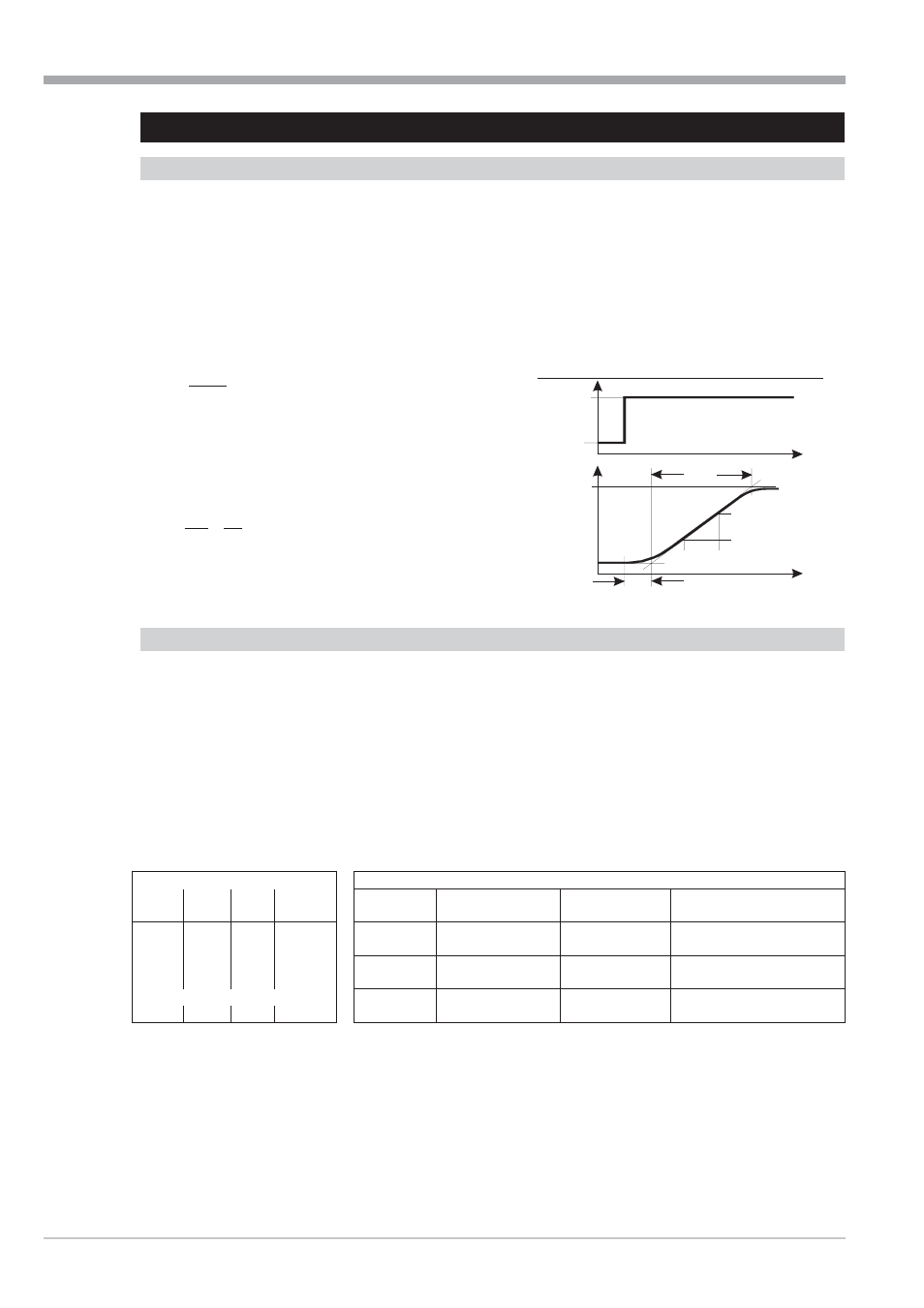
Characteristics are determined automatically by the controller during self-tuning and converted into control parame -
ters. In exceptional cases, however, manual determination of these process characteristics may be necessary. For this,
the response of process variable x after a step change of correcting variable y can be used (see Figure below).
Usually, it is not possible to plot the complete response curve (0 to 100 %), as the process must be kept within certain
limits.
The maximum rate of increase v
max
can be determined from the values T
g
and x
max
(complete step response) or
Dt and
Dx (partial step response).
K
Tu
V
Xh
=
Ч Ч
max
%
100
y = correcting variable
Y
h
= control range
Tu = delay time (s)
Tg = recovery time (s)
V
X
Tg
x
t
max
max
=
=
D
D
= max. rate of increase of process value
X
max
=
maximum process value
X
h
=
control range =
x100 - x0
Characteristic values of the controllers
Generally, quick line-out to the without oscillation is required.
Dependent of process, different control actions should be used.
w
Processes with good controllability (K < 10%) can be controlled by means of PD controllers,
w
Processes with medium controllability (K = 10...22%) can be controlled with PID controllers and
w
Processes with bad controllability (K > 22%) can be controlled with PI controllers.
The control parameters can be determined from the calculated values of delay time T
u
, max. rate of inrease v
max
, con-
trol range X
h
and characteristic value K according to the formulas. For more exact adjustment, see the hints given in
the table of parameter adjustment effects. Increase Xp if line-out oscillates.
Formulas
Parameter adjustment effects
Action
Xp[%]
Tv[s]
Tn[s]
Setting
Control
Line-out of distur-
bances
Start-up behaviour
(D)PID
1,7 K
2 Tu
2 Tu
Xp
higher
Increased damping
Slower line-out
Slower reduction pf energy
PD
0,5 K
Tu
Î = 0000
lower
Reduced damping
Faster line-out
Faster reduction of energy
PI
2,6 K
0
6 Tu
Tv
higher
Reduced damping
Faster response
Earlier reduction of energy
P
K
0
Î = 0000
lower
Increased damping
Slower response
Later reduction of energy
3-point stepping controller PID
Tn
higher
Increased damping
Slower line-out
Slower reduction of energy
1,7 K
Tu
2 Tu
lower
Reduced damping
Faster line-out
Faster reduction of energy
Controller
9499-040-82711
III-240
Optimizing the controller
Tu
Tg
t
{X
{t
x
y
100%
0%
Y
h
t
X
max
Fig.: 60 step response