Xw y, Phase – West Control Solutions KS98-1 User Manual
Page 255
Start in manual mode or in automatic mode :
Basically, the PIDMA self-tuning algorithm does not distinguish between these two start conditions. In both cases, the
operator must ensure that the process conditions are stable. In automatic mode, however, the PIDMA works with the
non-optimized parameters until start of the correcting variable pulse. This means that, in the majority of cases, better
stability of process conditions, i.e. better self-tuning results, are possible in manual mode. When changing to manual
mode, the correcting variable output last is taken over as manual correcting variable and used during estimation.
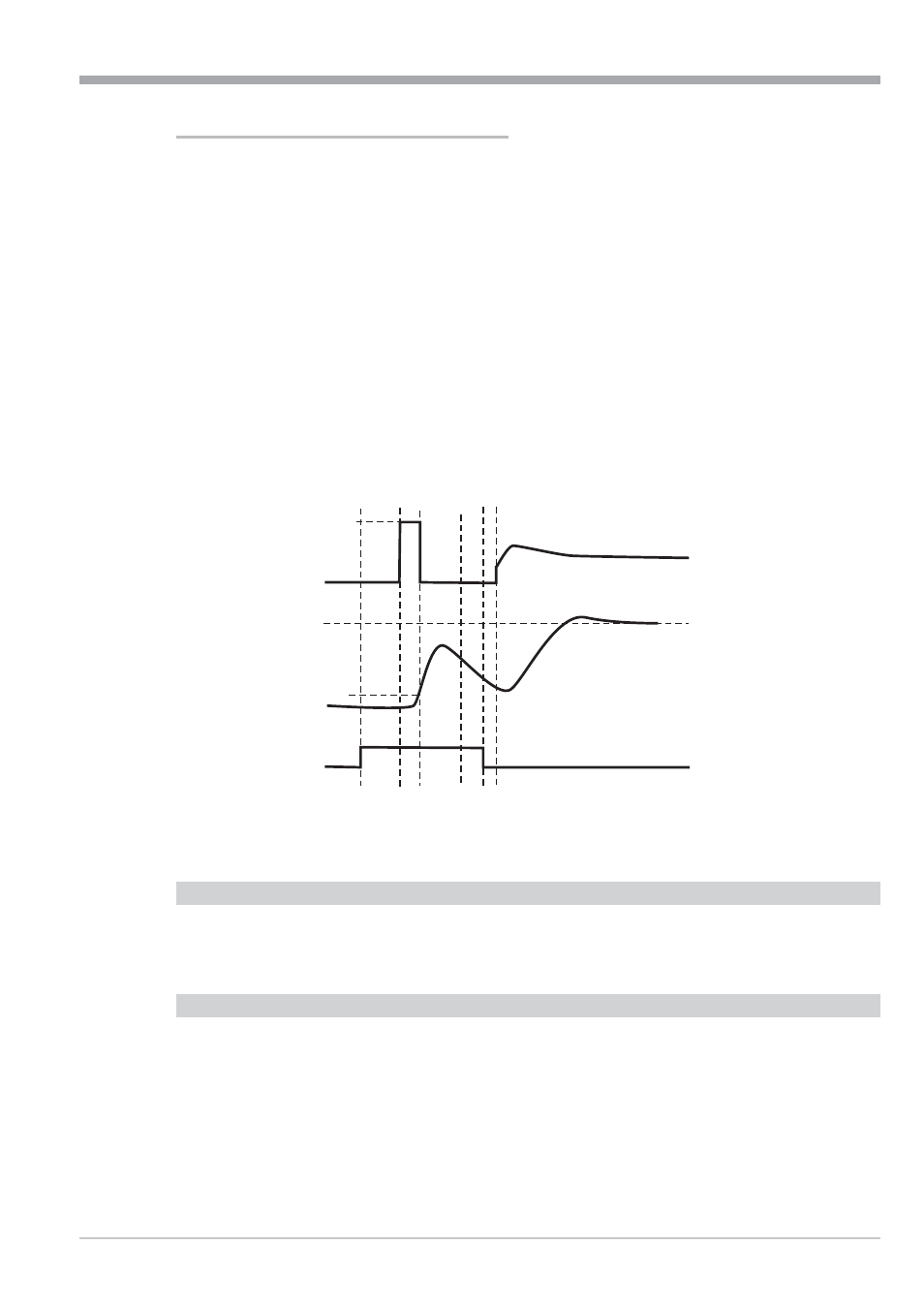
After self-tuning start, the estimation timer for drift detection and noise detection is started at first. In the second pha -
se, the correcting variable is changed by correcting variable step change
dYOpt. When the process value has chan-
ged by more than Xlimit, the correcting variable is reset to the original value. In the third phase, the PIDMA waits for
the maximum value of the increasing process value. Subsequently, it monitors the decaying process value in the fourth
phase. During this time, an estimation of the remaining time until completion of the self-tuning attempt is output.
After a successful self-tuning attempt, the controller goes to the automatic mode and controls the setpoint using the
new parameters. Parameter
Ores indicates the result of self-tuning completion (r see page 45) .
a
When self-tuning is finished with an error (
Ada_Err), the stable correcting variable is output, until
self-tuning is finished by the operator via the system menu, front panel key
H, or via the interface.
Self-tuning procedure with heating and cooling processes:
(3-point / split-range controller and mixed controllers)
With
PIDMA,different control gains for heating and cooling cannot be specified. For this reason, the 2-step self-tu -
ning attempt is omitted.
Signification of self-tuning messages
ORes
g
After successful self-tuning, parameter
CSpeed can be used to increase or reduce the attenuation, when
self-tuning was done with the setting for
CSpeed = “normal” . Moreover, only an increase or reduction of Kp
should be considered. After manual change of the controller parameters, the Cspeed switch-over stops being effective.
9499-040-82711
Controller characteristics and self-tuning with PIDMA
III-255
X
W
Y
0
0
2
2
1
1
t
t
t
t t
3
3
5
6
4
Phase
Fig. 70 PIDMA-optimization progress