Integrated position controller 252, Threepoint stepping (yp) 252, Thronoff 252 – West Control Solutions KS98-1 User Manual
Page 252: Xsh 252
III-16.10
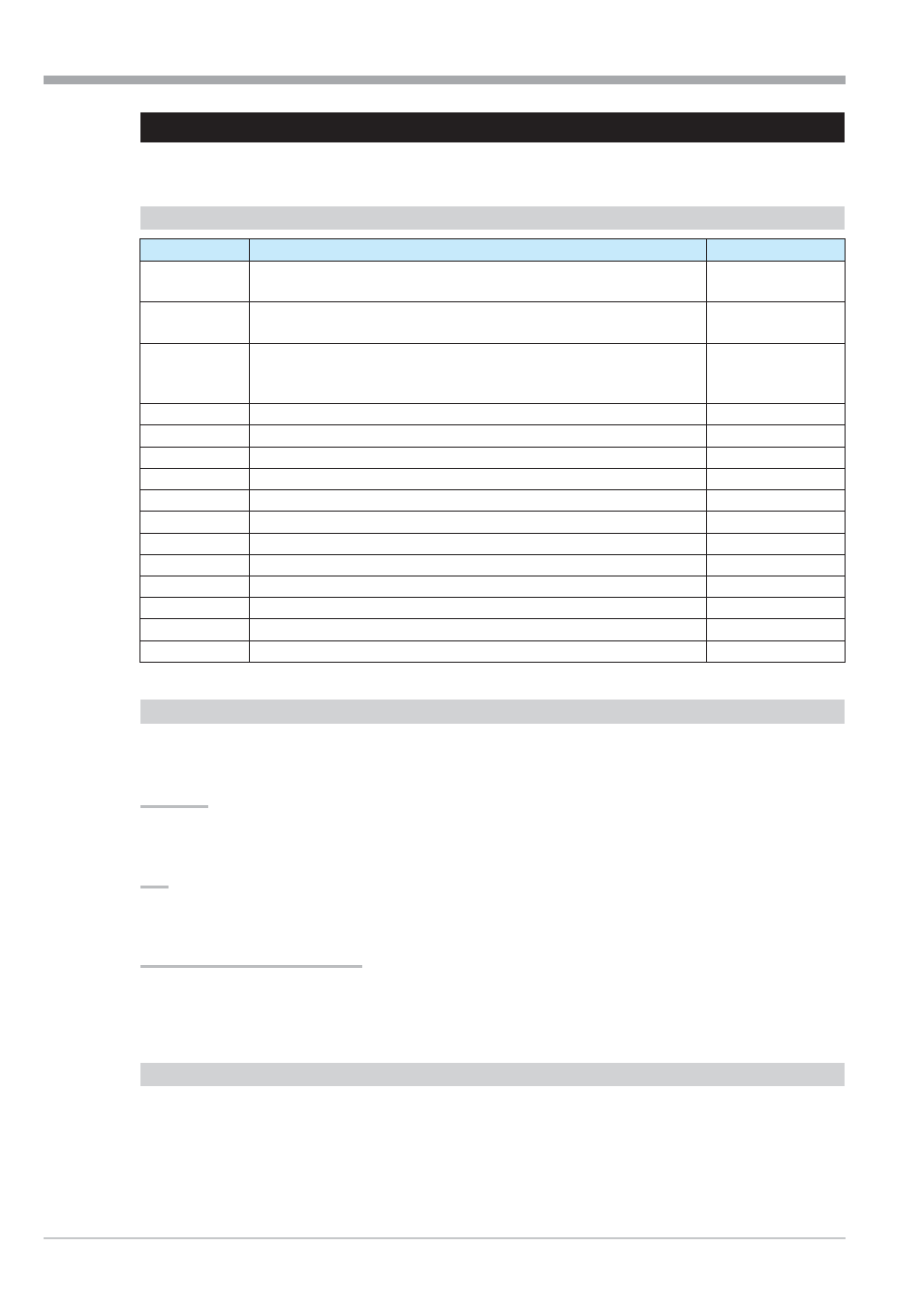
Controller characteristics and self-tuning with PIDMA
As opposed to CONTR and CONTR+, the PIDMA includes a modified parallel controller structure, which is taken into
account in the following additional parameters.
Additional parameters for PIDMA
Parameter
Description
Values
PType
Process type (a-priori information)
1: with compensation
2: without A.(integral)
Drift
Drift compensation des Istwertes zu Beginn der Selbstoptimierung
0: off
1: on
CSpeed
Required control loop dynamics
1: slow
2: normal
3:fast
Tpause
Minimum positioning step time (stepping controller)
0,1...999999[s]
thron
Switch-on threshold for OPEN and CLOSE (stepping controller)
0,2...100%
throff
Switch-off threshold for OPEN and CLOSE (stepping controller)
0,2...100%
Xlimit
Switch-off point for output step change (process value change)
0,5...999999
Tdrift
Time window for process value drift determination
0...999999
Tnoise
Time window for process value noise determination
0...999999
Kp
Control gain (replaces Xp1;/Xp2 of CONTR
)
0,001...999,9[%]
VD
Derivative gain (Td/T1)
1...999999
bW_p
Setpoint weighting factor of proportional action
0...1
cW_d
Setpoint weighting factor of D action
0...1
Tsat
Time constant for I action in Y limiting (anti-reset wind-up)
1...999999
xsh
Neutrale Zone, in dem der I-Teilfestgehalten wird
0 … 999999
Three-point stepping (Yp):
Tpause , thron and throff complete the effective parameters for stepping motor control. Tpause permits adjustment of
the minimum pause in addition to limiting of the minimum pulse via Tpuls.
thronoff:
The initially provided parameters for motor stepping controller structure in PIDMA are ineffective in the present reali -
zation. Only parameter xsh can be used for stabilizing the positioning activities.
Xsh
Xsh can be used to influence the motor actuator switching frequency and fine setting. Xsh determines the dead band
of the control deviation in the main controller. The controller I action is stopped within this zone.
Integrated position controller
With 3-point stepping controller with position feedback (step + Yp), the PIDMA function block comprises two control -
lers: the main controller controls the process value and provides a required actuator position to an integrated position
controller. By means of position feedback, this position controller ensures that the actuator position is as required.
Self-tuning:
PType, Drift, Cspeed, Xlimit, Tdrift and Tnoise complete parameter dYopt which is also effective with CONTR. These
parameters define the conditions during self-tuning.
Ptype determines, if the process is without compensation (the new process value after a correcting variable pulse is
higher, e.g. level of a container without outlet or well- insulated furnace). An even decrease or increase of the process
9499-040-82711
III-252
Controller characteristics and self-tuning with PIDMA