Helical interpolation -33, Yx z, Helical interpolation – HEIDENHAIN TNC 407 (280 580) ISO Programming User Manual
Page 166
5 - 3 3
TNC 426/TNC 425/TNC 415 B/TNC 407
5
Programming Tool Movements
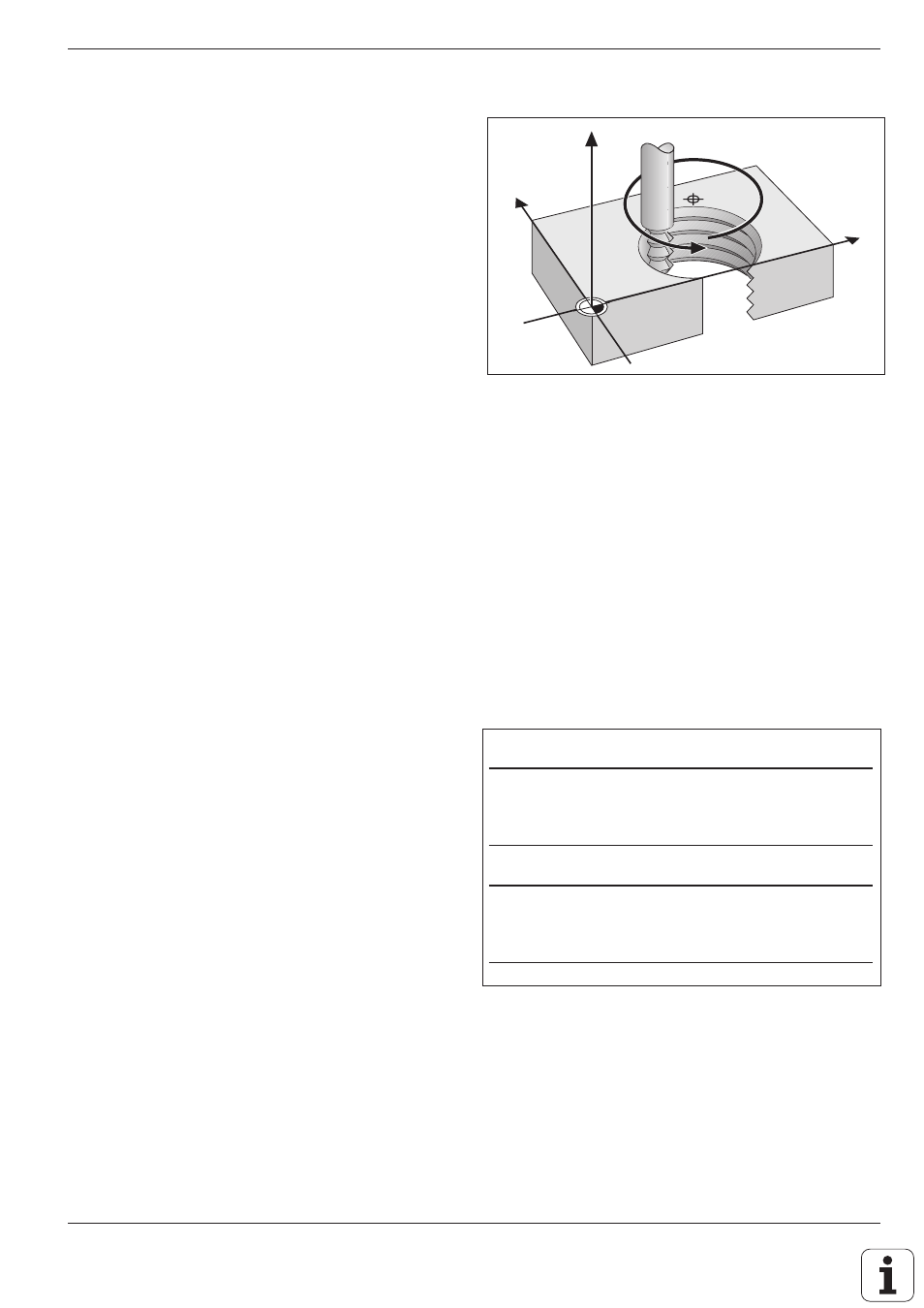
Fig. 5.40: A helix combines circular motion with linear motion
Path Contours – Polar Coordinates
Y
X
Z
I, J
Helical interpolation
A helix is a combination of circular motion in a main
plane and linear motion in a plane perpendicular to
the main plane.
Helices can only be programmed in polar
coordinates.
Applications
You can use helical interpolation with form cutters
to machine:
• Large-diameter internal and external threads
• Lubrication grooves
Input
• Total incremental angle of tool traverse on the helix
• Total height of the helix
Total incremental angle
Calculate the total incremental polar angle G91 H as follows:
H
= n
.
360°,
where
n is the number of revolutions of the helical path.
G91 H can be programmed with any value from –5400° to +5400°
(i.e., up to
n = 15).
Total height
Enter the height
h of the helix referenced to the tool axis. The height is
determined as follows:
h = n
.
P,
where
n is the number of thread revolutions and P is the thread pitch.
Radius compensation
Enter the radius compensation for the helix
according to the table at right.
Fig. 5.41:
The shape of the helix determines the direction of rotation
and the radius compensation
Internal thread
Work direction
Rotation
Radius comp.
Right-handed
Z+
G13
G41
Left-handed
Z+
G12
G42
Right-handed
Z–
G12
G42
Left-handed
Z–
G13
G41
External thread
Work direction
Rotation
Radius comp.
Right-handed
Z+
G13
G42
Left-handed
Z+
G12
G41
Right-handed
Z–
G12
G41
Left-handed
Z–
G13
G42