Yx z – HEIDENHAIN TNC 407 (280 580) ISO Programming User Manual
Page 164
5 - 3 1
TNC 426/TNC 425/TNC 415 B/TNC 407
5
Programming Tool Movements
Path Contours – Polar Coordinates
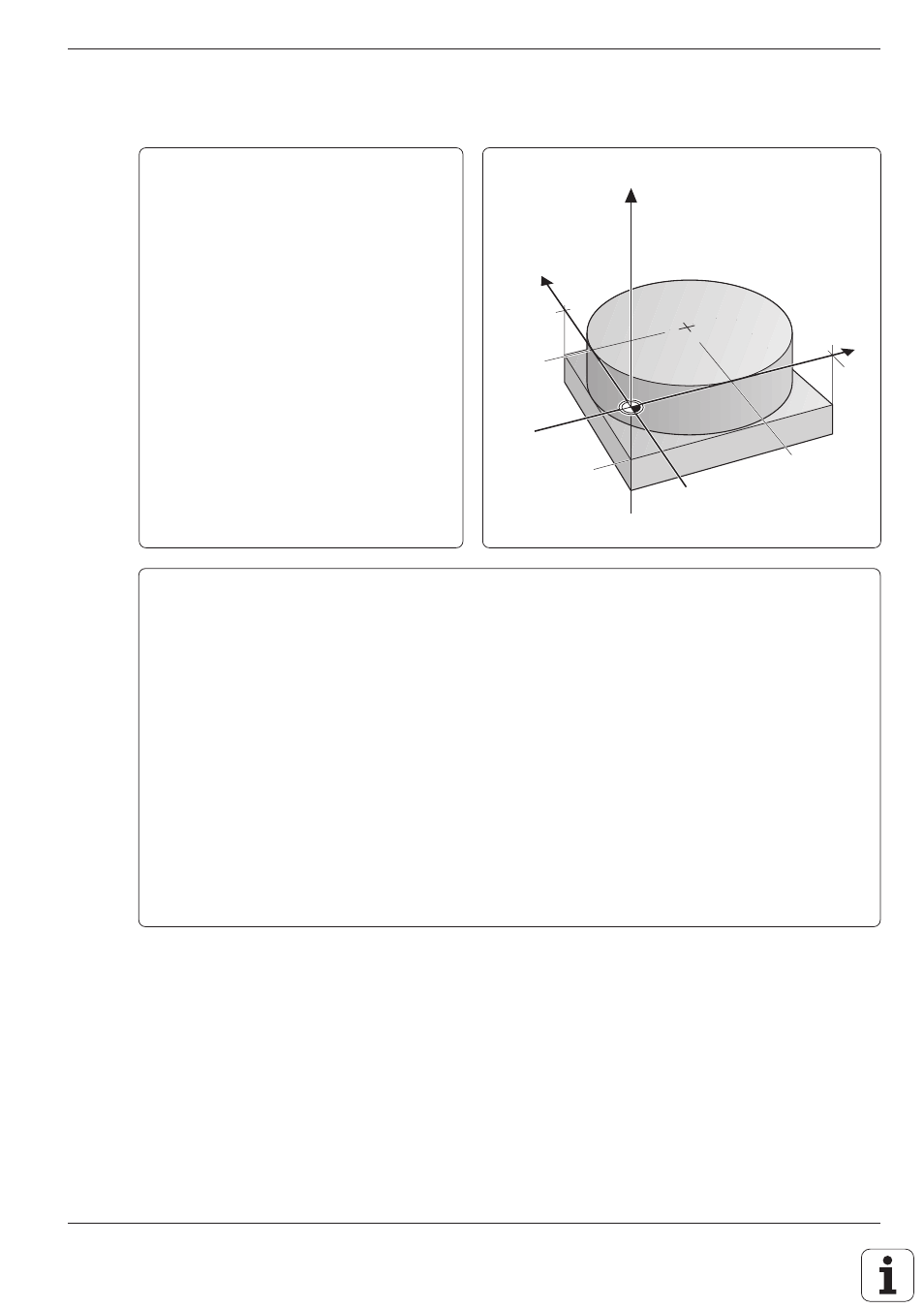
Example for exercise: Milling a full circle
Circle center
coordinates:
X
= 50 mm
Y
= 50 mm
Radius:
R
= 50 mm
Milling depth:
Z
= – 5 mm
Tool radius:
R
= 15 mm
Part program
%S532I G71 * .................................................................................. Begin the program
N10 G30 G17 X+0 Y+0 Z–20 * ........................................................ Define the workpiece blank
N20 G31 G90 X+100 Y+100 Z+0 *
N30 G99 T25 L+0 R+15 * ................................................................ Define the tool
N40 T25 G17 S1500 * ...................................................................... Call the tool
N50 G00 G40 G90 Z+100 M06 * ..................................................... Retract and insert tool
N60 I+50 J+50 * .............................................................................. Set pole
N70 G10 R+70 H+280 * .................................................................. Pre-position in the working plane with
polar coordinates
N80 Z–5 M03 * ................................................................................ Move tool to working depth
N90 G11 G41 R+50 H–90 F100 * .................................................... Approach the contour with radius compensation
at machining feed rate
N100 G26 R10 * .............................................................................. Soft (tangential) approach
N110 G12 H+270 * .......................................................................... Circle to end point H = 270°, negative direction
of rotation
N120 G27 R10 * .............................................................................. Soft (tangential) departure
N130 G10 G40 R+70 H–110 * ......................................................... Depart contour, cancel radius compensation
N140 Z+100 M02 * .......................................................................... Retract in the infeed axis
N99999 %S532I G71 *
–5
100
100
I = 50
J = 50
Y
X
Z