IAI America SCON-CA User Manual
Page 99
Chapter 3 Operation
89
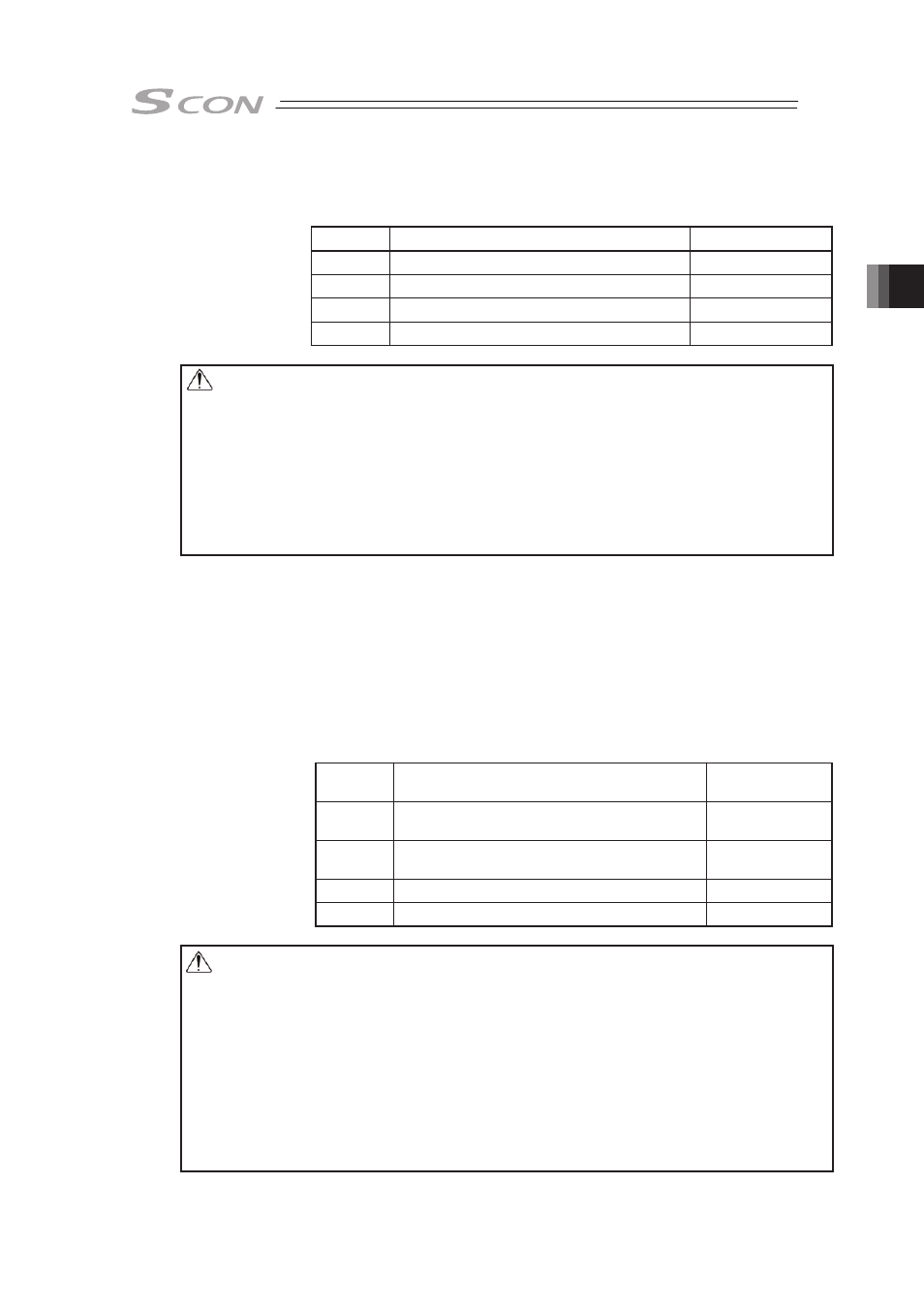
14) Stop mode ················Automatic servo OFF is enabled after a certain period from the
completion of positioning for power saving.
A proper period can be selected from three parameters.
Setting
Operation after completion of operation
parameter No.
0
Servo ON not changed
–
1
Automatic servo OFF after certain period
36
2
Automatic servo OFF after certain period
37
3
Automatic servo OFF after certain period
38
� �
Caution: � No retaining torque is provided in automatic servo OFF. Pay sufficient
attention to the setting because the actuator may be moved by external force
applied to it.
�
Do not use the automatic servo OFF if the next moving command is relative
distance specification (pitch feed). Failure to follow it may cause position shift
to occur.
�
Do not use the automatic servo OFF in pressing. If used, the pressing force is
lost.
�
Automatic Servo OFF would not function in the operation with teaching mode
of PC software.
15) Vibration suppress No.····· Suppresses vibration (sympathetic vibration) of the load
installed on the actuator.
The vibration suppress No. can accept three types of
vibrations.
Four parameters are defined for a single vibration to form a
single set.
In the position table, parameter sets are defined to correspond
to position numbers for which vibrations must be suppressed.
[Refer to Chapter 5 Vibration Suppress Control Function
(Option) for details.]
Setting
Vibration suppress frequency
(Natural frequency)
Parameter No.
0
Vibration suppress frequency (Natural
frequency)
–
1
Normal position control (no vibration
suppress)
97 to 100
2
Vibration suppress control parameter set 1
101 to 104
3
Vibration suppress control parameter set 2
105 to 108
� �
Caution: (1) The natural frequency range between 0.5Hz and 30Hz can be suppressed.
(2) The target vibrations are those of the load induced by the actuator
connected to the controller.
Any other vibrations cannot be suppressed.
(3) Vibrations to be suppressed should be in the same direction as that in which
the actuator is moved. Vibrations in any other directions cannot be
suppressed.
(4) The function is not applied to the home return and pressing operations.
(5) The function is not available in the pulse train control mode.
(6) One or more setting vibration frequencies are rather low, the tact time may
be long. With a vibration frequency being 6Hz or less, the positioning
convergence time is 150ms or longer.�