IAI America SCON-CA User Manual
Page 183
Chapter 3 Operation
173
3.3.6 Parameter Settings Required for Advanced Operations
Depending on systems and/or loads, set the following parameters if necessary.
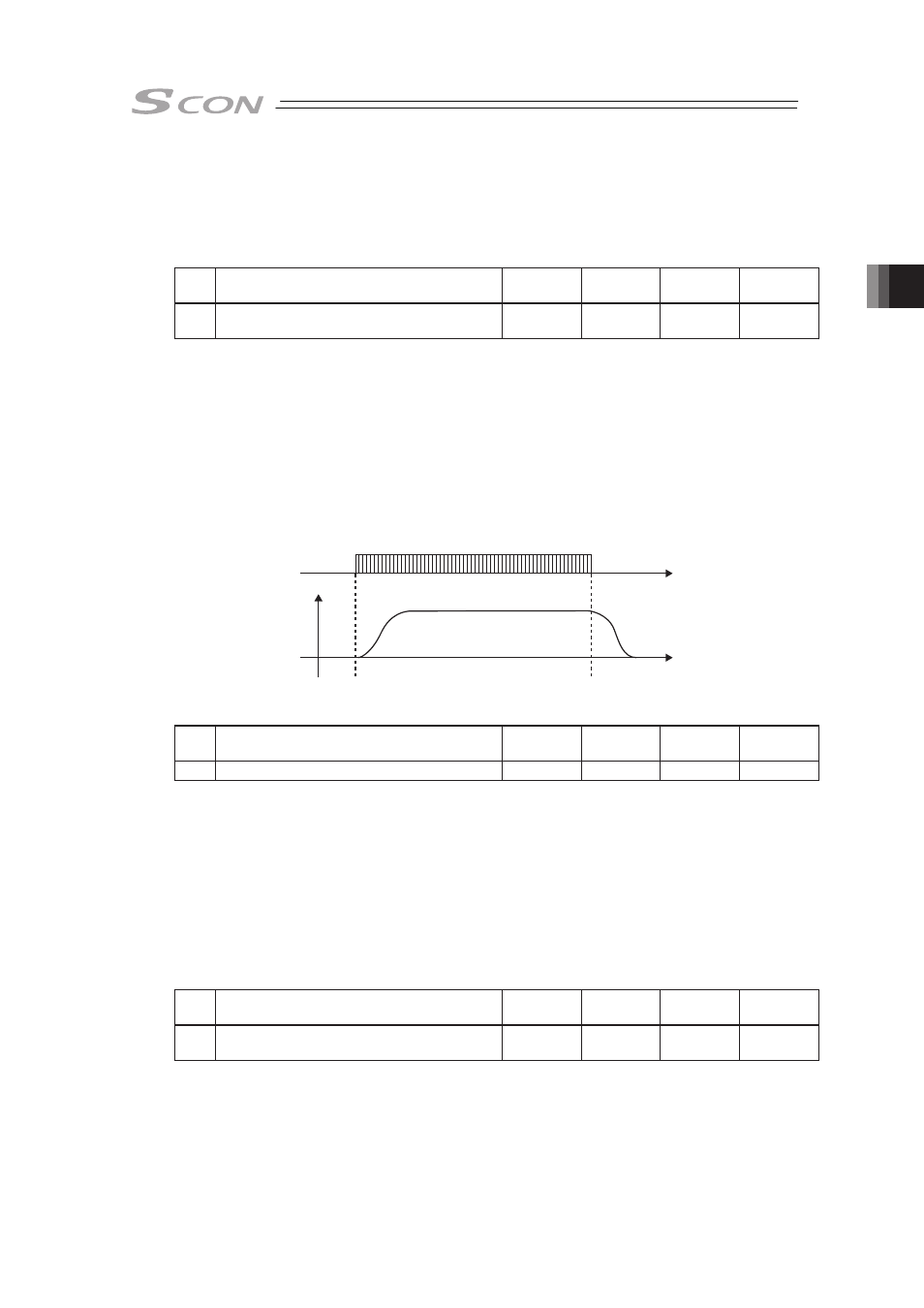
[1] Position command primary filter time constant
No.
Name
Symbol
Unit
Input
Range
Initial
Value
55
Position command primary
filter time constant
PLPF
msec
0.0 to
100.0
0.0
The acceleration/deceleration of the actuator can be set in S-shaped curve with this parameter
setting. (It is not the S-shaped acceleration/deceleration function.)
If command pulse train is input at a certain frequency, the actuator is accelerated/decelerated
slowly depending on the time constant.
The actuator moves by the number of command pulses.
Even if the host controller (PLC etc.) has no acceleration/deceleration function or the
frequency of command pulses varies rapidly, the actuator can be accelerated/decelerated
smoothly.
The delay in positioning stabilizing time requires approximately 3 times longer than the set
value after the command pulse input stop. If the set value is 100msec, the stabilizing time
would be approximately 300msec.
Pulse Train
Velocity
[2] Torque Limit
No.
Name
Symbol
Unit
Input
Range
Initial
Value
57
Torque Limit
TQLM
%
0 to 70
70
Set a desired torque limit used in the torque limit input signal (TL), which is an external input
signal.
Set a desired torque as a percentage of the rated thrust representing 100% (the rated thrust is
specified in the catalog).
When the external torque-limit input signal (TL) turns ON, the torque will be limited according
to the setting.
Once the torque current reaches a level corresponding to the specified torque limit, the torque
limiting signal (TLR) will be output as an external output signal.
[3] Clearing deviation during servo OFF or alarm stop
No.
Name
Symbol
Unit
Input
Range
Initial
Value
58
Clearing deviation during servo OFF
or alarm stop
FSTP
–
0 to 1
1
In this parameter, can select whether to activate or inactivate the function to clear the
differential at the servo OFF and alarm stop.
It is recommended not to change this setting from the initial setting.
0: Disable
1: Enable