4] speed change during the movement, Chapter 3 operation, Sample use – IAI America SCON-CA User Manual
Page 153
Chapter 3 Operation
143
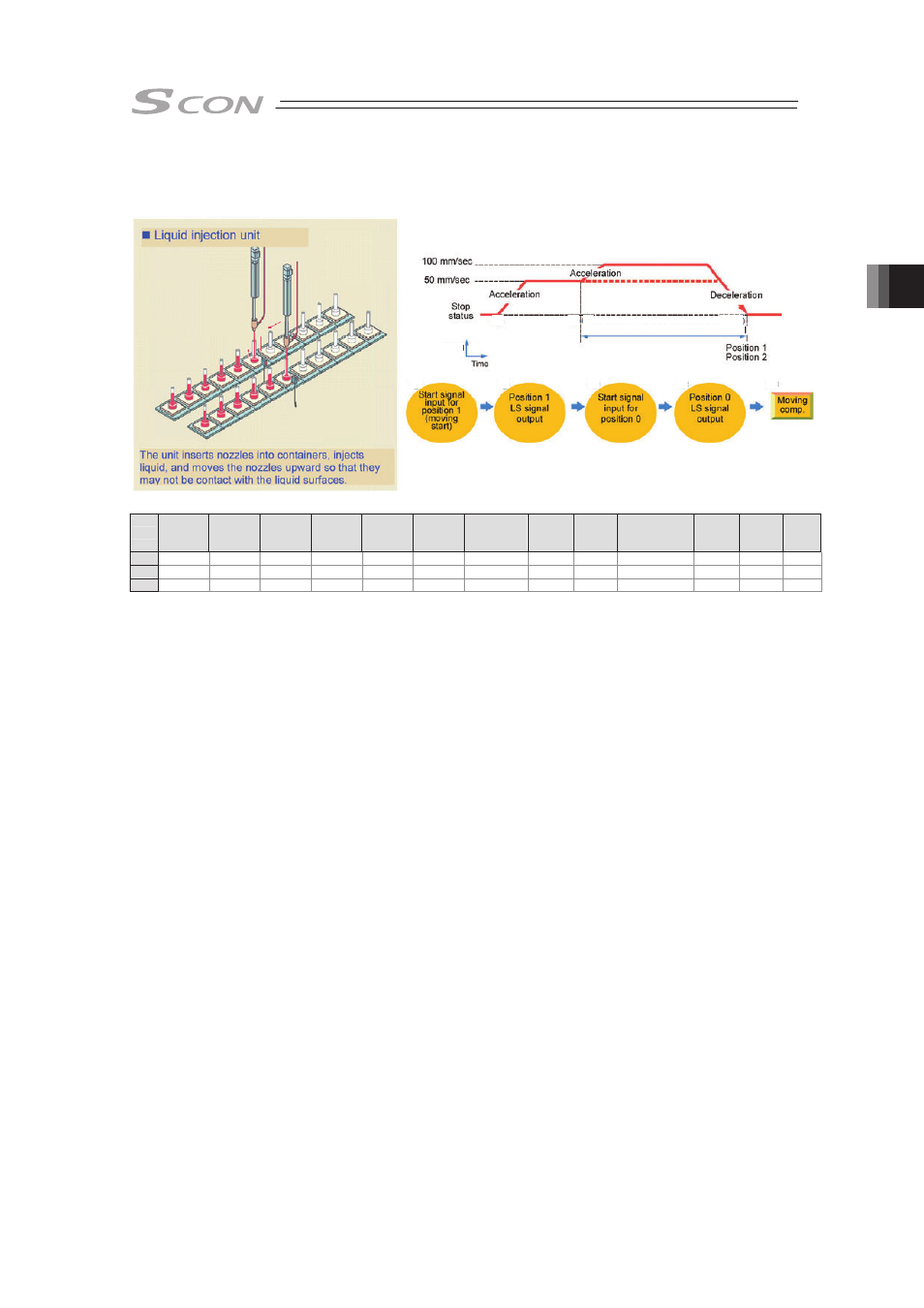
[4] Speed change during the movement
�
Sample use
No.
Position
[mm]
Velicoty
[mm/s]
Accele-
ration
[G]
Decele-
ration
[G]
Pressing
[%]
Thresh-
old
[%]
Positioning
width
[mm]
Zone+
[mm]
Zone-
[mm]
Acceleration/
Deceleration
mode
Incre-
mental
Gain
set
Stop
mode
0
0.00
100.00
0.20
0.20
0
0
0.10
0.00
0.00
0
0
0
0
1
0.00
50.00
0.20
0.20
0
0
100.00
0.00
0.00
0
0
0
0
2
150.00
200.00
0.20
0.20
0
0
0.10
0.00
0.00
0
0
0
0
�
Control method
The speed of the actuator can be changed while it moves. The operation control method is the
same as that in [3] Positioning. This pattern prioritizes the start signal specified later over the
previous signal. Accordingly if another position No. is started during operation, then the new
operation begins. This can be used to change the speed.
1) In this example, the speed is changed while the actuator moves from the position of
150mm to the position of 0mm. At first, set the positioning to the target position at the first
speed in position No.1. In the positioning width, set the distance from the speed change
position to the target position. The value is set to 100mm in the example. Thus, for position
No.1, position sensing signal LS1 is turned ON at the position before the target position by
100mm.
2) Set the positioning to the target position at the second speed in position No.0.
3) Then start position No.1 (ST1 signal) and use position sensing output signal LS1 of
position No.1 to start position No.0 (ST0 signal). Since this pattern prioritizes the signal
specified later over the previous signal, the operation of No.1 is changed to the operation
of No.0 during the operation of No.1.
(Note) If there is a signal commanded afterwards, the commanded signal will start
activating once the previously commanded signal is turned OFF.
4) Use position sensing signal LS0 of position No.0 to turn the ST1 signal OFF.
In this example, the target positions No.2 and 3 are equal with each other. They may not be the
same. However, setting the target positions to be equal with each other allows the distance
from the speed change position to the target position to be known easily.
Depending on the timing when the actuator accepts the input signal, the speed change may be
delayed a little. Changing the positioning width can adjust the timing.
Velocity
1)
2)
3)
4)
5)
1)
2) 3)
4) 5)
Positioning complete width at position 1