IAI America SCON-CA User Manual
Page 165
Chapter 3 Operation
155
[6] Home Return (HOME, HEND)
Input
Output
PIO signal
HOME
HEND
The HOME signal is intended for automatic home return.
When the HOME signal is turned ON, the command will be processed at the leading edge (ON
edge) of the signal and the actuator will perform home return operation automatically.
Once the home return is completed, the HEND (home return completion) signal will turn ON.
Set the home (enter “0”) in the current value register of the host controller (PLC) using the
current value preset function, etc., when the HOME signal turns ON.
Caution:
(1) The HOME signal is given priority over any pulse train command. Even when the
actuator is moving with a pulse train command, it will start home return once the
HOME signal is turned ON.
(2) The HOME signal is processed only at the leading edge (ON edge) of the signal.
(3) If the SON signal is turned OFF or an alarm is detected during home return, the home
return operation will stop. If the servo is turned OFF, the home return command will be
cancelled even when the HOME signal remains ON. To perform home return again,
therefore, turn the HOME signal OFF and then turn it ON again.
(4) The actuator can be operated without using this function. If this function is not used,
however, management of position data will solely be dependent on the host controller
(monitoring soft stroke limit is effective in the home return complete status).
Therefore, take the necessary measures to prevent an over-stroke, such as not
sending pulse commands with travel distances exceeding the effective stroke or
providing external limit switches for stroke end detection, etc., to forcibly stop the
actuator.
(5) Servo-off or deviation counter clearing causes HEND to be turned OFF. Perform home
return again.
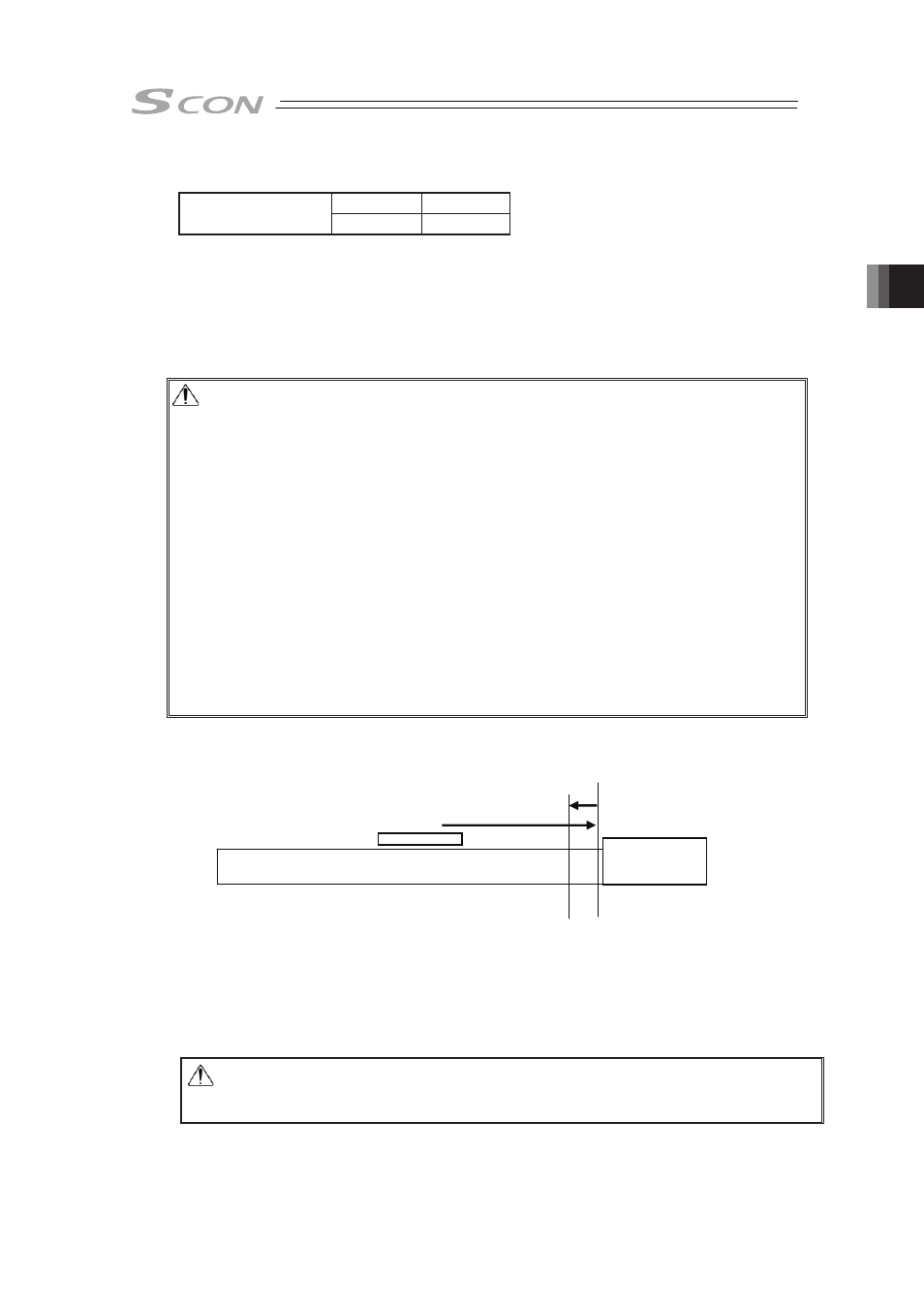
[Operation of Slider Type/Rod Type Actuator]
1) With the HOME signal being ON, the actuator moves toward the mechanical end at the
home return speed.
The moving speed is 20mm/s for most actuators but less than 20mm/s for some actuators.
Check the instruction manual of each actuator.
2) The actuator is turned at the mechanical end and stopped at the home position. The
moving distance is the value set by Parameter No.22 “Home return offset level”.
(Note 1)
� �
Caution: In the home reverse specification, the actuator moves in the reverse direction.
Make sure to refer to Section 8.2 [18] when a change to Parameter No.22
“Home Return Offset Level” is required.
Note 1: It moves for the offset amount after the encoder Z-phase is detected.
Mechanical end
Home
1)
2)