IAI America SCON-CA User Manual
Page 122
Chapter 3 Operation
112
� �
Caution: (1) The speed during pressing operation is set in Parameter No.34. Check the
10.4 List of Specifications of Connectable Actuators for the pressing
operation speed.
Do not set any value larger than the value in the list. If the speed set in the
position table is equal to or less than the pressing speed, the pressing is
performed at the setup speed.
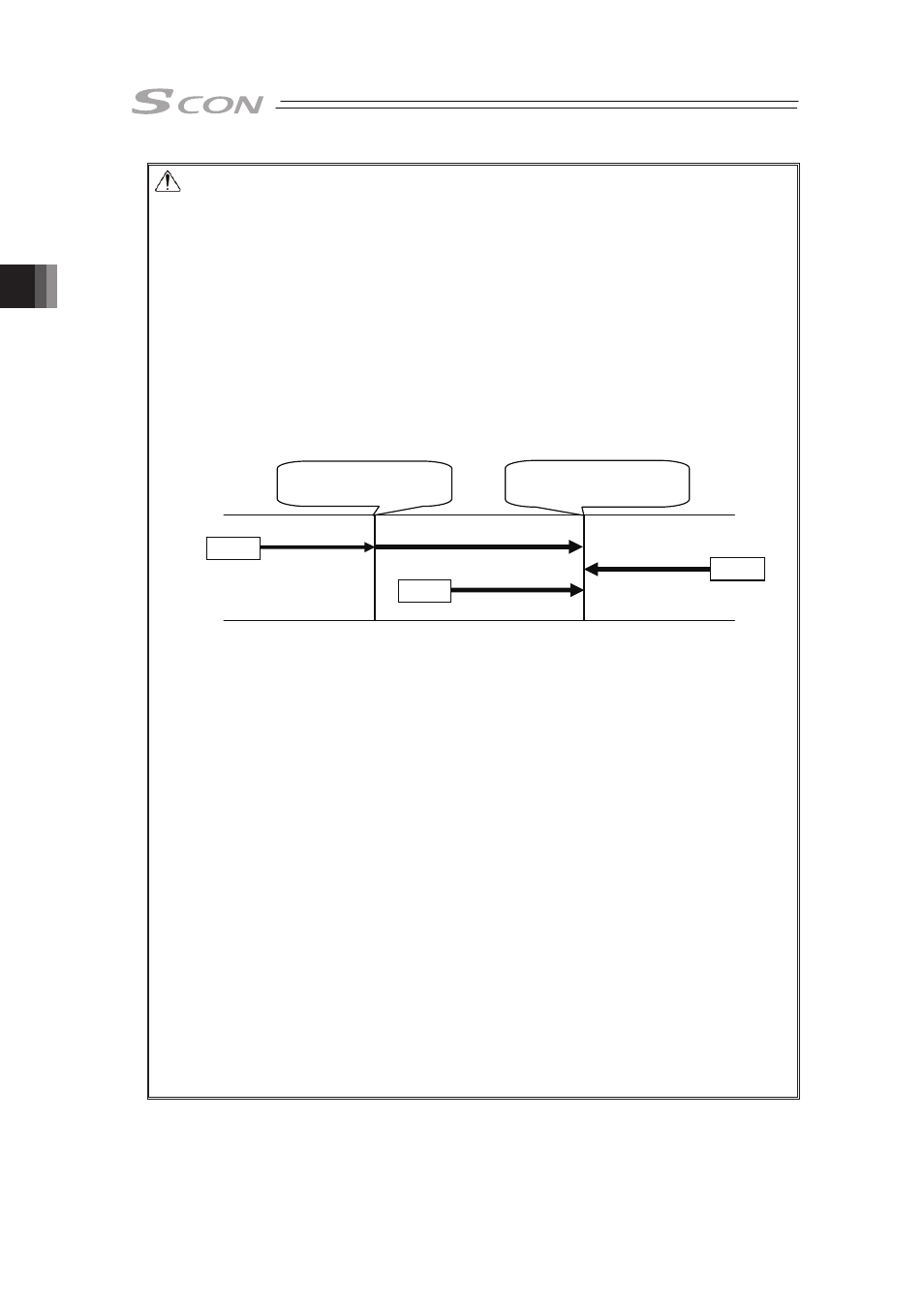
(2) The approach start position of pressing should be located at or before the
pressing start position (coordinate 100mm or less in the above example) If
not, the moving direction varies depending on the start position to be
dangerous.
For example, if the pressing operation is conducted from a coordinate value
above the pressing complete position (above 150mm), it will become the
tension operation from the current point to the pressing complete position.
Please note that it cannot be the pressing operation to the point of 150mm
after the positioning at the point of 100mm.
(3) The work is pressed after the pressing is completed. The work may moves
backward or forward. If the actuator is moved backward before the
approach position, alarm code 0DC “Pressing Motion Range Over Error”
occurs to stop the actuator. In movement of the work in the pressing
direction, PEND is turned OFF if the load current becomes lower than the
current limit (pressing (%)). Miss-pressing occurs when the actuator moves
by the pressing moving distance set in “Positioning width”. Completed
Position No. PM1 to PM** keep turned on until the next movement
command is made even if the work piece gets moved and pushed
backward or goes further forward once they are turned on at the pressing
operation complete.
(4) Do not make control of changing to pressing on the way of normal
positioning (before PEND turning ON). Depending on the position at which
start signal CSTR is turned ON, the pressing is performed improperly. Then
the PLC cannot manage the position of the actuator.
(5) Pressing operation cannot be performed with the rotary actuator. If the
index mode is selected for the rotary actuator of multi-rotation specification,
pressing operation cannot be set. The positioning complete signal PEND is
turned ON when the actuator reaches the positioning width.
(6) If the actuator gets pressed to the work during the approach operation, 0DC
“Pressing Motion Range Over Error” would be issued.
(7) If the actuator is RCS2-RA13R (Ultra-High Thrust Type), there is a limit in
the duration and duty of continuous pressing. Use of the product above this
limit may cause a failure occurred due to the motor heat generation.
[Refer to 10.4.2 Specifications and Limitations in Pressing Operation of
RCS2-RA13R]
Pressing start position
100mm
Pressing end position
100 + 50 = 150mm
CSTR
Pressing operation
CSTR
Approach operation
CSTR: Start position
CSTR
Pressing operation
Tension operation