Chapter 3 operation – IAI America SCON-CA User Manual
Page 94
Chapter 3 Operation
84
3.2.1 Set of Position Table (This section is not required in selection of pulse train
control mode.)
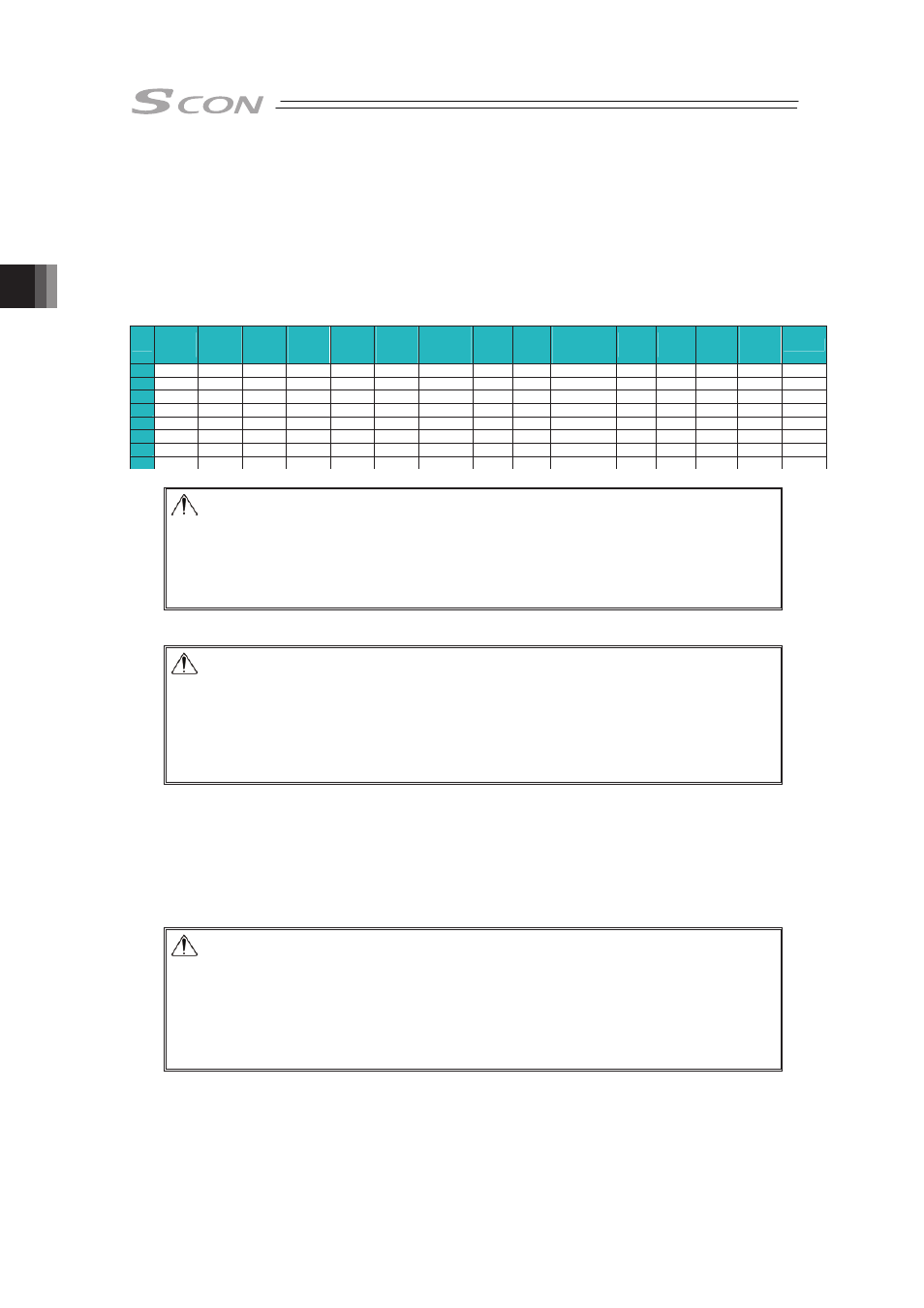
The values in the position table can be set as shown below. For only positioning, only the
position data may be written if specifying the speed, acceleration, and deceleration is not
required. The speed, acceleration, and deceleration are automatically set to the data defined by
the relevant parameters. Therefore, setting the speed, acceleration, and deceleration data
often used to the relevant parameters makes input easy.
1)
2)
3)
4)
5)
6)
7)
8)
9)
10)
11)
12)
13)
14)
15)
No.
Position
[mm]
Velocity
[mm/s]
Accele-
ration
[G]
Decele-
ration
[G]
Pressing
[%]
Thresh-
old
[%]
Positioning
width
[mm]
Zone+
[mm]
Zone-
[mm]
Acceleration/
Deceleration
mode
Incre-
mental
Gain
set
Stop
mode
Vibration
suppress
No.
Comment
0
0.00
100.00
0.30
0.30
0.00
0.00
0.10
0.00
0.00
0
0
0
0
0
1
100.00
100.00
0.30
0.30
0.00
0.00
0.10
0.00
0.00
0
0
0
0
0
2
150.00
200.00
0.30
0.30
50.00
0.00
30.00
0.00
0.00
0
0
0
0
0
3
200.00
400.00
1.00
1.00
0.00
0.00
0.10
0.00
0.00
0
0
0
0
1
4
200.00
200.00
0.30
0.30
0.00
0.00
0.10 250.00 230.00
0
0
0
0
2
5
500.00
50.00
0.10
0.10
0.00
0.00
0.10
0.00
0.00
0
0
0
0
0
6
7
� �
Caution:
The input value is treated as the angle for the rotary actuator.
Therefore;
[mm] � [deg]:················· 1.2 = 1.2deg
[mm/s] � [deg/s]: ··········· 100 = 100deg/s
Note that the notation is [mm] on the screen of the teaching tool such as
PC software.�
1) Position No.·············· It is the number commanded by PLC in operation command.
� �
Caution: Do not use position No.0 if available positions remains enough.
At the first servo ON after power ON, the completed position No. output is
0 even if the actuator is not located at position No.0. The actuator enters
into the same state as that at positioning to position No.0. The completed
position No. output is 0 during movement of the actuator. To use position
No.0, get the command history by using the sequence program to check
completed position No.0 based on the history.
2) Position [mm] ··········· Positioning coordinate value. Enter it as the distance from the home
position.
For pitch feed (relative movement = incremental feed), enter the pitch
width.
A value with – indicates that the actuator moves toward the home
position. A value without – indicates that the actuator moves to be
away from the home position.
� �
Caution: (1) In the case of a Gripper Type:
Set the coordinate value on the single finger basis. Set the moving
distance of a single finger from the home. In the specification, the
stroke indicates the total moving distance of both fingers.
Thus the actual stroke is a half of the value in the specification.
(2) In the case of a Rotary Type
Set the coordinate value by an angle from the home.