Chapter 2 wiring – IAI America SCON-CA User Manual
Page 53
Chapter 2 Wiring
43
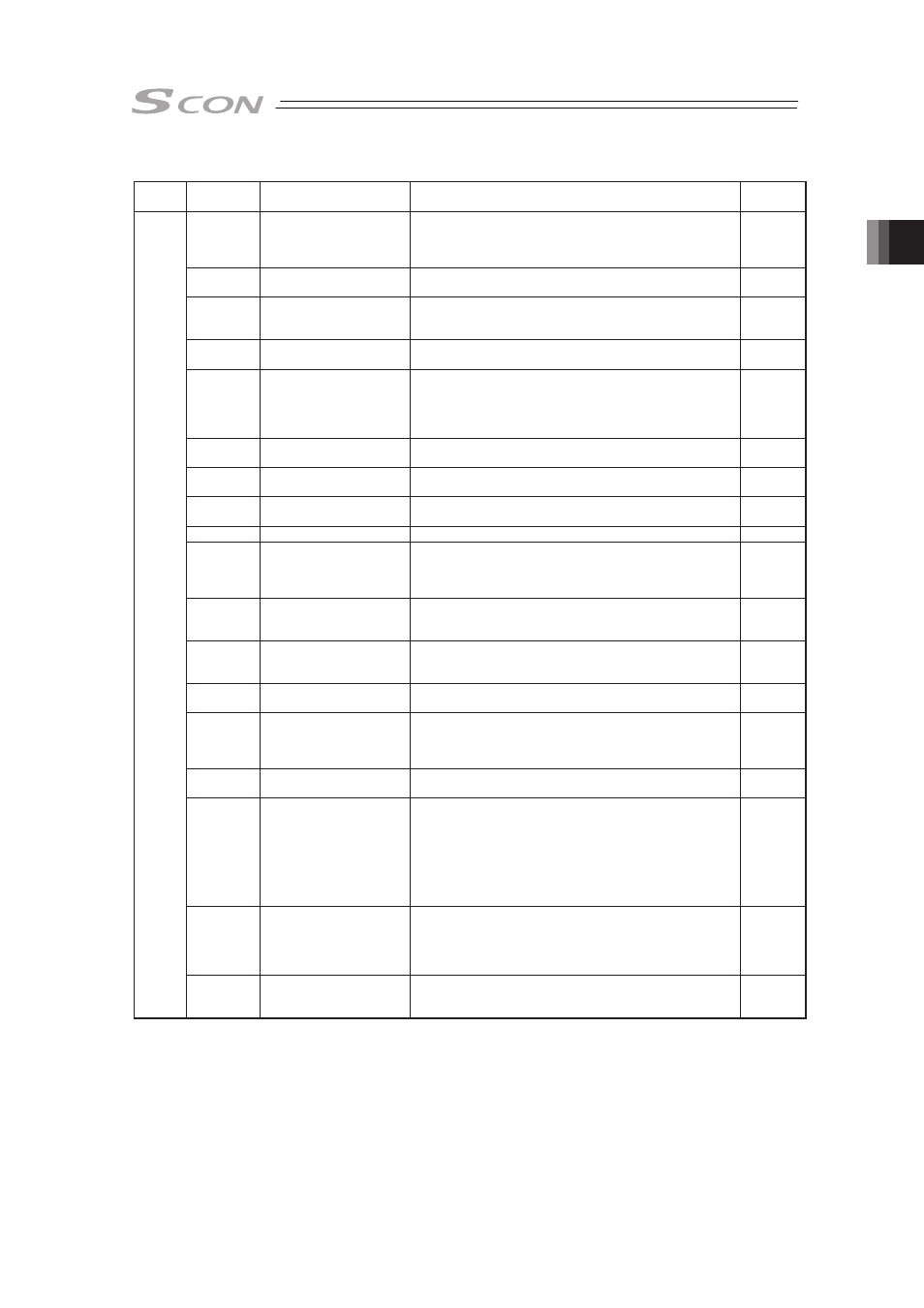
Category
Signal
Abbreviation
Signal Name
Function Description
Relevant
Sections
PEND/INP Position complete
Turns ON in the positioning band range after actuator
operation. The INP signal will turn OFF if the position
deviation exceeds the in-position range. PEND and INP can
be switched over by the parameter.
3.2.3
3.2.4
3.2.5
PM1 to
PM256 Completion Position No.
The position No. reached after the positioning completion,
is output (binary output).
3.2.4
HEND
Home return completion
This signal will turn ON when home return has been
completed.
It will be kept ON unless the home position is lost.
3.2.3
ZONE1 Zone
Turns ON if the current actuator position is within the range
set to the parameter.
3.2.3
PZONE Position Zone
This signal will turn ON when the current actuator position
enters the range specified the position data after position
movement. Even though it can be used together with
ZONE1, PZONE will become only available for operation by
the set position number.
3.2.3
RMDS
Operation Mode Status
Output
Outputs the operation mode status. It turns on when the
controller is on Manual Mode.
3.2.3
*ALM
Alarm
Turns ON when the controller is in normal condition, and
turns OFF when an alarm is generated.
3.2.3
MOVE
Moving
Turns ON during the actuator is moving (including
home-return operation and pressing operation).
3.2.3
3.2.4
SV
Servo ON
This signal will remain ON while the servo is ON.
3.2.3
*EMGS Emergency Stop Output
This signal remains ON while the controller is under the
emergency stop reset condition and turns OFF when the
emergency stop condition is enabled. (Regardless of
alarms.)
3.2.3
MODES Teaching Mode Output
This signal will turn ON while the teaching mode is enabled
by the input of the mode signal and will turn OFF when the
mode changes to the normal mode.
3.2.4
WEND
Writing Complete
It is OFF during the teaching mode and turns ON when the
writing by PWRT Signal is complete. It turns OFF when
PWRT Signal turns OFF.
3.2.4
PE0 to PE6 Current Position Number In the electromagnetic valve mode, this signal will turn ON
when the actuator completes moving to the target position. 3.2.5
LS0 to LS2 Limit Switch Output
Turns ON when the current actuator position is within the
range of positioning band (+/-) of the target position. It is
output even before the movement command and the servo
is OFF if the home-return operation is completed.
3.2.6
CEND
Loadcell Calibration
Complete
Turns ON after loadcell calibration is complete. This signal
turns OFF if CLBR signal is turned OFF.
3.2.7
*BALM Warning for Absolute
Battery Voltage Drop
Turns ON when the battery voltage for the absolute type
actuator is within the normal voltage range. This signal is
always ON for the incremental type actuator.
Also, it turns OFF if exceeded the overload warning
threshold when the overload warning function is used.
By the setting in Parameter No.151, apart from the above, it
is able to turn it OFF also when the message level alarm is
generated.
Chapter 7
LOAD
Load Output Judgment
Signal
Outputs when current exceeds the value set to “threshold”
within range of position data “ZONE+” or “ZONE-” during
the pressing operation.
Utilize this signal for a judgment of a press-fitting process
being properly performed.
3.2.4
3.2.5
Output
TRQS
Torque Level Output
Outputs when current of motor reaches the value set to
“threshold” by the slider (or rod) being hit to an obstacle
during the pressing movement.
3.2.4
3.2.5
Signal with “*” expresses the signal of active low. It is ON when the power is applied to the controller, and turns OFF when the
signal is output.