IAI America SCON-CA User Manual
Page 173
Chapter 3 Operation
163
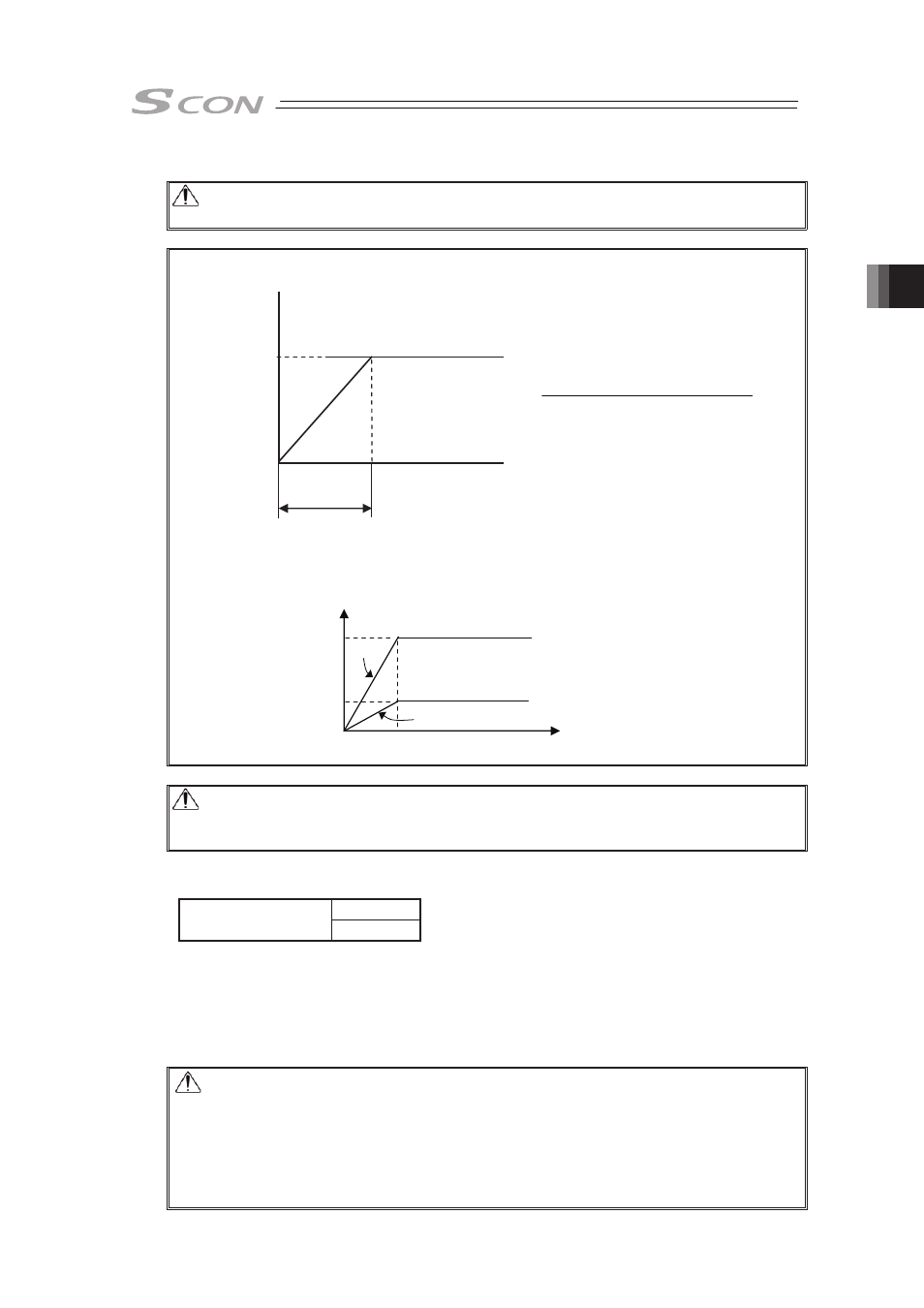
Time Constant
Motor Rotation
Caution: Consider the electric gear ratio of the host side and that on this controller side
when having a calculation.
(Reference) Acceleration/deceleration settings of general positioning device
�
1G=9800mm/s
2
: Acceleration capable to accelerate up to 9800mm/s per second
0.3G:Acceleration capable to accelerate up to 9800mm/s × 0.3 = 2940mm/s per second
�
�
�
�
�
�
�
�
�
Caution: Caution: Set the acceleration/deceleration speed not to exceed the maximum
acceleration/deceleration speed of the actuator. An operation with exceeding
condition may cause a malfunction.
[2] Position complete (INP)
Output
PIO signal
INP
This signal will turn ON when the remaining travel pulses (accumulated pulses) on the
deviation counter enters the positioning width.
When the servo is ON, this signal turns ON when the accumulated pulses on the deviation
counter are within the number of pulses set in Parameter No.10 “Default positioning width”.
This signal is OFF while the servo is OFF.
Caution:
(1) This signal will turn ON when the servo turns ON (because positioning is executed at
the current position where the servo is ON).
(2) The conditions of the output of this signal are the deviation (servo lag pulses) and the
variance in the command pulses in 1ms.
Even if the deviation is within the positioning width, the signal would not turn ON if
there is a variance to the command pulse in 1ms.
Motor Rotation [rpm] =
Velocity [mm/s]
Ball Screw • Lead Length [mm/rev]
�
60
Velocity
Time
9800mm/s
1s
1G
2940mm/s
0.3G