IAI America SCON-CA User Manual
Page 175
Chapter 3 Operation
165
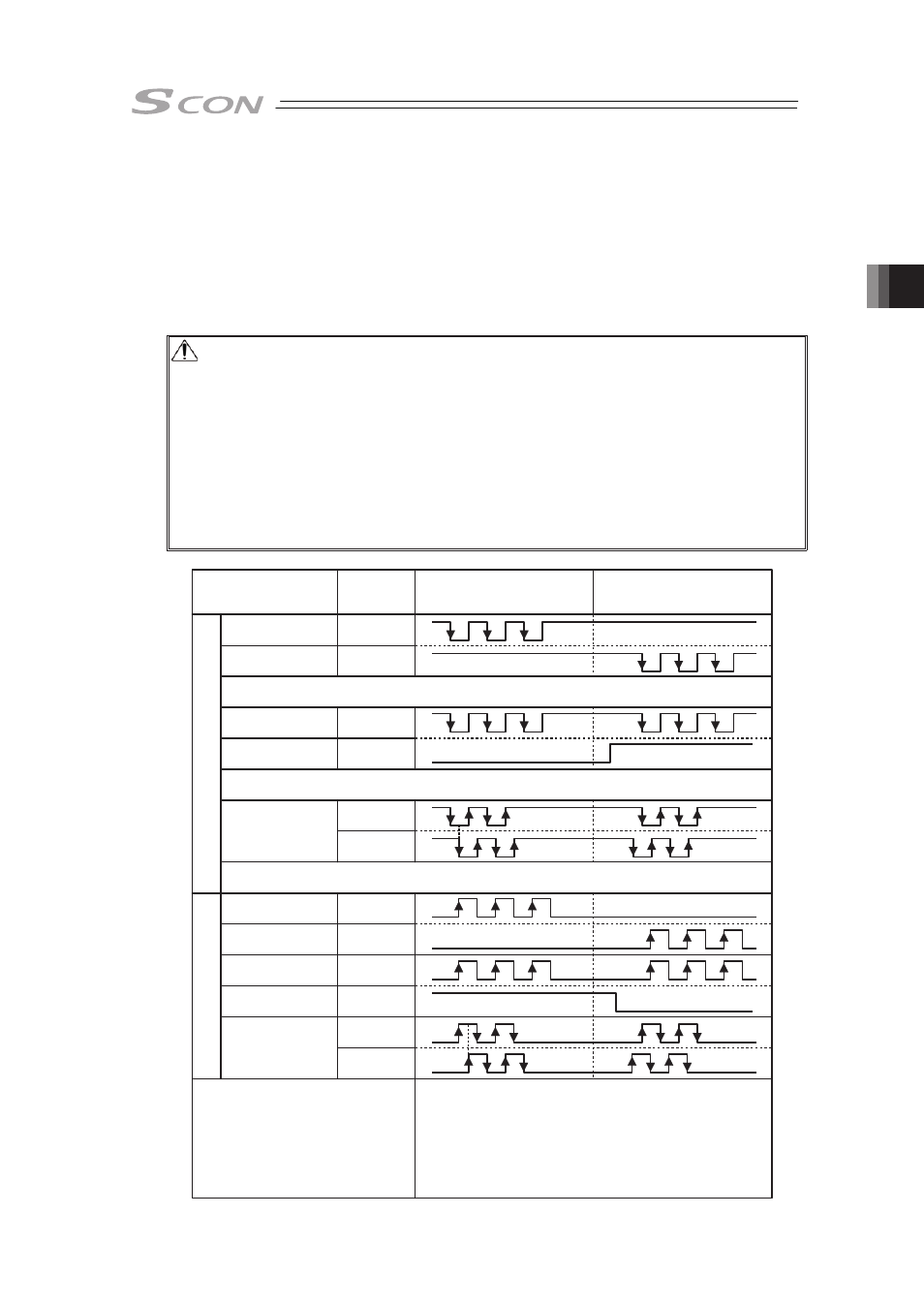
[5] Feedback Pulse Output (AFB•/AFB, BFB•/BFB, ZFB•/ZFB)
Data of detected positions are output using differential pulses (phases A, B and Z of up to
2.5Mpps). The host controller can read the current actuator position in real time using a counter
function, etc. This function is also available in Positioner Mode.
6 types of feedback pulse train can be selected. Set the pulse train format in Parameter No.69
and active high/low in Parameter No.70. The output also can be done with a different electric
gear ratio from the input pulse by the settings of Parameters No.114 to 116.
Caution:
(1) These pulse signals can be disabled using user Parameter No.68 “Enable or disable
(default) feedback pulses”. Set this parameter to “Disable” if the feedback pulses are
not used.
(2) If these signals are to be read by the host controller to set a closed loop, set a logically
consistent sequence to implement the applicable processing.
(3) If the actuator encoder is not a serial encoder, the phase-Z signal is output directly.
If the actuator uses a serial encoder, the phase-Z pulse is output within a mechanical
angle range of �0.5� from the zero (home) position. Based on the communication cycle
with the encoder, this precision can be assured when the motor velocity is 100rpm or
below.
AFB•/AFB
BFB•/BFB
AFB•/AFB
BFB•/BFB
AFB•/AFB
BFB•/BFB
AFB•/AFB
BFB•/BFB
AFB•/AFB
BFB•/BFB
AFB•/AFB
BFB•/BFB
ZFB•/ZFB
High
Low
High
Low
Normal Rotation
Pulse String
Normal Rotation
Pulse String
Reverse Rotation
Pulse String
Reverse Rotation
Pulse String
The normal rotation pulse string shows the motor rotation amount in normal direction, and reverse
rotation pulse string shows the motor rotation amount in reverse direction.
Pulse Train
Pulse Train
Symbol
Symbol
The command pulse shows the motor rotation amount and the command symbol shows the
rotation direction.
A/B Phase
Pulse String
A/B Phase
Pulse String
The A/B Phase 4-fold Pulse with the phase difference of 90º shows the commands for
the rotation amount and direction.
Command Pulse
String Mode
Input
Terminal
In Normal Rotation
In Reverse Rotation
Negative Logic
Positive Logic
When the actuator encoder is other than the serial encoder,
the Z-phase signal is output as it is. In the case of serial
encoder, the range of ±0.5º of mechanical angle from the
point 0 position (origin), is output as the Z-phase signal.
Only when the motor rpm is 100rpm or less, this accuracy
can be guaranteed for the communication frequency with the
encoder.