Efficient Networks Siemens Sinamics S120 User Manual
Page 90
Servo control
3.11 Sensorless operation (without an encoder)
Drive Functions
90
Function Manual, (FH1), 07/2007 Edition, 6SL3097-2AB00-0BP4
be enabled. A large discrepancy between the actual and setpoint speed can cause a
malfunction.
WARNING
Once the pulses have been canceled, no information about the motor speed is available.
The computed actual speed value is then set to zero, which means that all actual speed
value messages and output signals are irrelevant.
Switchover between closed-loop/open-loop operation and operation with/without encoder
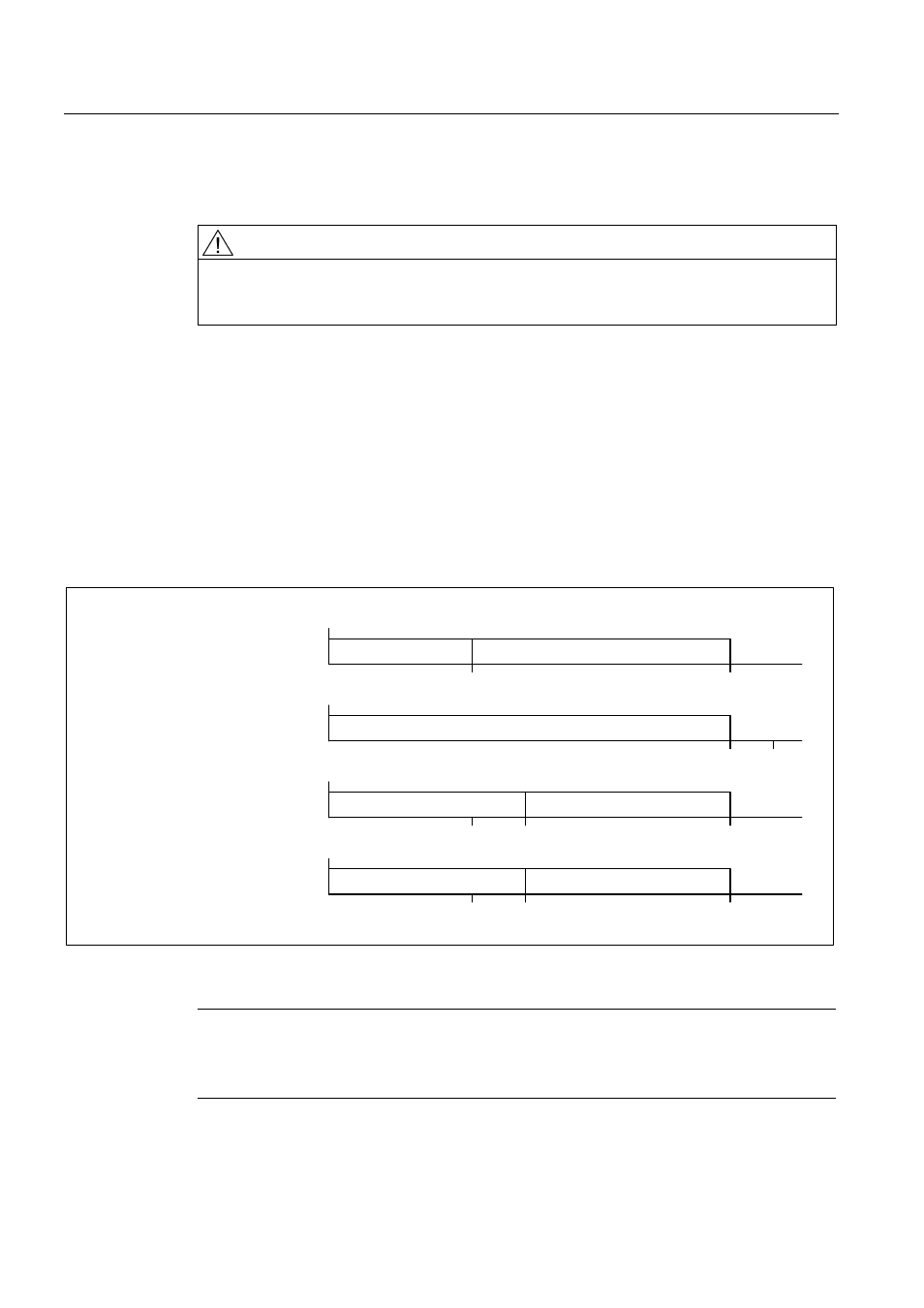
Operation without an encoder is activated via parameter setting p1300 = 20. If p1300 = 20 or
p1404 = 0, operation without an encoder is active across the entire speed range. If the
speed value is less than the changeover speed p1755, the motor is operated in accordance
with the current/frequency.
During operation with an encoder, a switchover can be made to operation without an
encoder when the speed threshold p1404 is exceeded. If p1404 > 0 and p1404 < p1755, a
switchover is not made to operation without an encoder until the speed exceeds p1755.
Operation without an encoder is displayed in parameter r1407.1.
:LWKRXWHQFRGHU
2SHQORRS,IFORVHGORRS
S RUS
(QFRGHUHYDOXDWLRQ
S
&ORVHGORRSPRWRUPRGHO
2SHQORRS
2SHUZLWKHQFRGHU
Q
PD[
Q
Q
Q
PD[
0L[HGRSHUDWLRQ
S
S!
Q
2SHUZLWKHQFRGHU
2SZLWKRXWHQFRGHU
Q
PD[
Q
2SHUZLWKHQFRGHU
2SZLWKRXWHQFRGHU
Q
PD[
S
S
S
S S
S
^
Figure 3-17 Area switchover
Note
In closed-loop control operating mode "Speed controller without encoder", a rotor position
encoder is not required. Since a temperature monitor is not usually connected in this case
either, this must be parameterized via p0600 = 0 (no sensor).