4 motion control with profinet, After the beginning of the cycle – Efficient Networks Siemens Sinamics S120 User Manual
Page 448
Communication PROFIBUS DP/PROFINET IO
10.3 Communications via PROFINET IO
Drive Functions
448
Function Manual, (FH1), 07/2007 Edition, 6SL3097-2AB00-0BP4
10.3.4
Motion Control with PROFINET
Motion Control/Isochronous drive link with PROFINET
5
'[
'[
'[
'[
'[
'[
'[
'[
'[
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5 5
5
5 5
,2'HYLFH
WR
6SHHG
FRQWUROF\FOH
3RVLWLRQFRQWUROOHU
F\FOH
&RQWUROOHU
3RVLWLRQFRQWUROOHU
7
&$&)
[7
'&
&$&)
7
'&
7
&$B6WDUW
7
&$B6WDUW
7
&$B9DOLG
7
,2B,QSXW
7
,2B,QSXW
7
,2B2XWSXW
7
,2B,QSXW
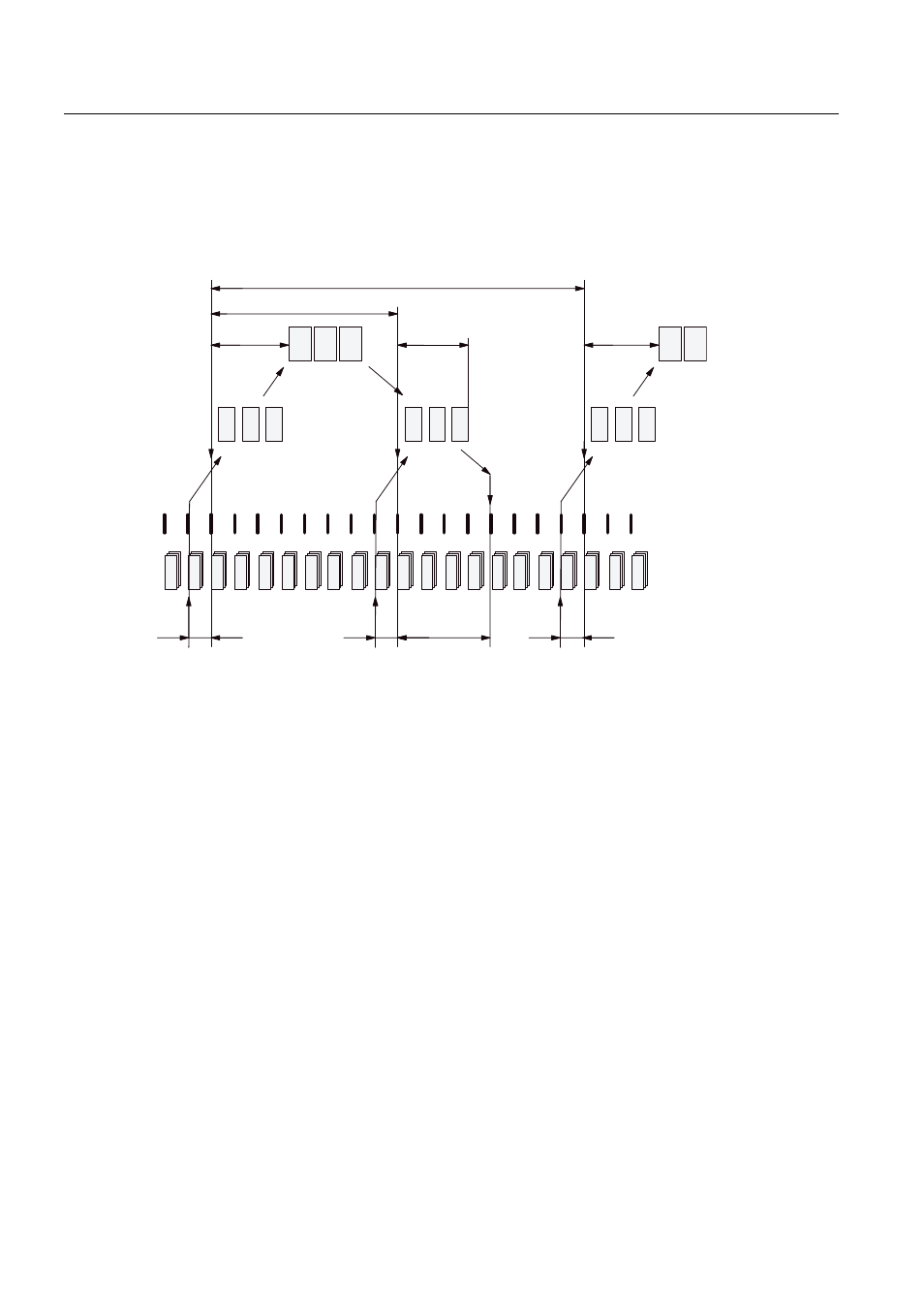
Figure 10-48 Motion Control/Isochronous drive link with PROFINET, optimized cycle with CACF = 2
Sequence of data transfer to closed-loop control system
1. Position actual value G1_XIST1 is read into the telegram image at time T
IO_Input
before the
start of each cycle and transferred to the master in the next cycle.
2. Closed-loop control on the master starts at time T
CA_Start
after each position controller
cycle and uses the current actual values read previously from the slaves.
3. In the next cycle, the master transmits the calculated setpoints to the telegram image of
the slaves. The speed setpoint command NSOLL_B is issued to the closed-loop control
system at time T
IO_Output
after the beginning of the cycle.