Function diagrams (see sinamics s list manual) – Efficient Networks Siemens Sinamics S120 User Manual
Page 128
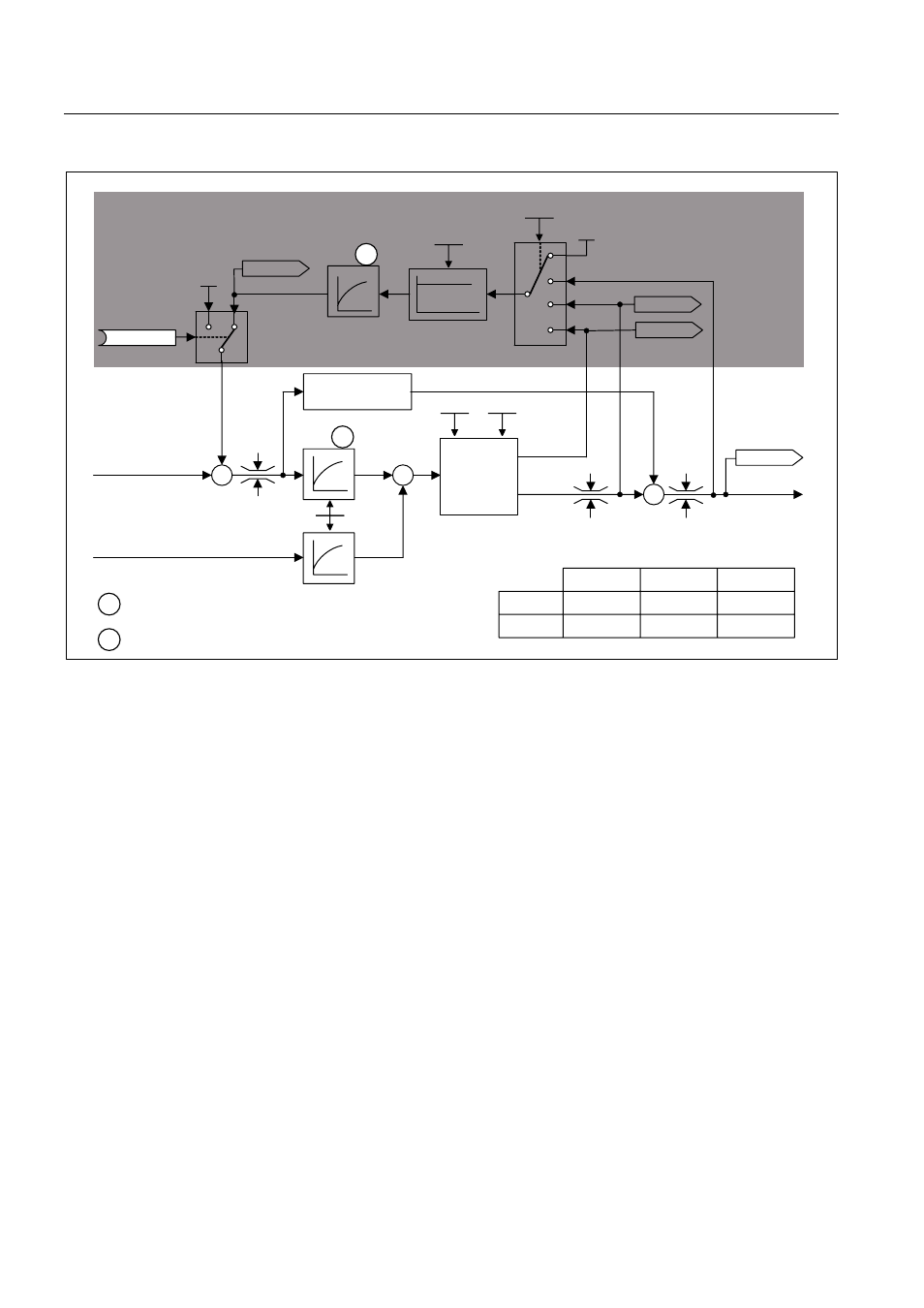
Vector control
4.6 Droop
Drive Functions
128
Function Manual, (FH1), 07/2007 Edition, 6SL3097-2AB00-0BP4
6SHHGVHWSRLQW
3UH
FRQWURO
7RUTXH
VHWSRLQW
6HWSRLQW
6/9&
9&
'URRSLQMHFWLRQ
2QO\DFWLYHLISUHFRQWUROLVDFWLYHS!
2QO\DFWLYHZLWK6/9&
7L
.S
7Q
$FWXDOVSHHG
3,
7RUTXH
FRQWUROOHU
.S
7Q
7L
U>@
U>@
U
U
U
U
U
S
S
S
S
S
S
S
S
U
U
U
S
PV
Figure 4-10 Speed controller with droop
The droop function has a torque limiting effect on a drive that is mechanically coupled to a
different speed (e.g. guide roller on a goods train). In this way, a very effective load
distribution can also be realized in connection with the torque setpoint of a leading speed-
controlled drive. In contrast to torque control or load distribution with overriding and
limitation, with the appropriate setting, such a load distribution controls even a smooth
mechanical connection or the case of slipping.
This method is only suitable to a limited extent for drives that are accelerated and braked
with significant changes in speed.
The droop feedback is used, for example, in applications in which two or more motors are
connected mechanically or operate with a common shaft and fulfill the above requirements. It
limits the torque differences that can occur as a result of the mechanical connection between
the motors by modifying the speeds of the individual motors (drive is relieved when the
torque becomes too great).
Prerequisites
● All connected drives must be operated with vector control and speed control (with or
without an encoder).
● Only a single common ramp function generator may be used for mechanically coupled
drives.
Function diagrams (see SINAMICS S List Manual)
● 6030 Speed setpoint, droop, acceleration model